 STECHOQ TRAINING CENTER
STECHOQ TRAINING CENTER
Remote Terminal Unit (RTU)
BAB 7
Remote Terminal Babs (RTUs)
Remote Terminal Babs (RTUs)
Selain peralatan komunikasi, sistem SCADA dicirikan oleh dua elemen lain, Bab terminal jarak jauh (RTU) dan Bab terminal induk (MTU). Di Bab 2 kita membahas secara singkat apa itu RTU dan MTU dan apa fungsinya. Pada Bab ini, kita akan membahas lebih detail tentang RTU.
Tujuan Pembelajaran — Setelah Anda menyelesaikan Bab ini, Anda harus :
A. Memahami apa yang dilakukan RTU, bagaimana melakukannya, dan mengapa.
B. Ketahui bagaimana elemen ini cocok dengan paket SCADA umum dan bagaimana elemen ini berinteraksi dengan proses dan dengan tautan komunikasi.
7 - 1. Apa yang Dilakukan RTU?
Di Bab 1, kami membahas fungsionalitas RTU dalam istilah "kotak hitam" yang menyelesaikan beberapa fungsi yang didefinisikan dengan buruk. Gambar 7-1 menunjukkan sinyal apa yang masuk ke RTU dalam bentuk blok; Gambar 7-2 menunjukkan sinyal apa yang meninggalkan RTU. Untuk meninjaunya secara singkat, RTU mengumpulkan informasi dari lapangan tentang nilai analog, alarm dan titik status, serta jumlah terukur. Itu membuat informasi ini tersedia dalam memori sampai MTU memintanya. Kemudian kode dan mengirimkan informasi ke MTU. Selain itu, ketika MTU menginstruksikan, RTU membuka dan menutup katup, menghidupkan dan mematikan saklar, mengeluarkan sinyal analog yang dapat mewakili titik setel, dan mengeluarkan rangkaian pulsa untuk menggerakkan motor loncatan. Ini mungkin tampak seperti daftar fungsi yang agak terbatas, tetapi cukup untuk menyelesaikan semua kendali jarak jauh dan pemantauan yang perlu dilakukan.
RTU sekarang ditawarkan yang memiliki kemampuan untuk menerima dan mengirim pesan ke perangkat lapangan dalam format serial, biasanya RS-232. Dalam kebanyakan kasus, fitur ini tidak meningkatkan fungsionalitas SCADA; namun, ini menyederhanakan beberapa transfer data lokal lapangan. Dalam waktu dekat, kita dapat mengharapkan bahwa komunikasi serial dalam bentuk fieldbus akan melebihi jumlah sinyal analog 4-20 mA yang digunakan sekarang. Pada saat ini ditulis, fieldbus baru mulai muncul dalam desain kontrol proses. Keuntungannya, terutama untuk sistem kecil, sangat solid sehingga jelas akan menjadi protokol pilihan untuk instalasi lapangan dalam sistem SCADA.
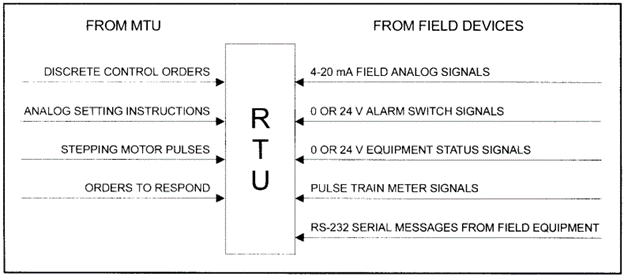
Gambar 7-1. Sinyal yang Masuk ke RTU
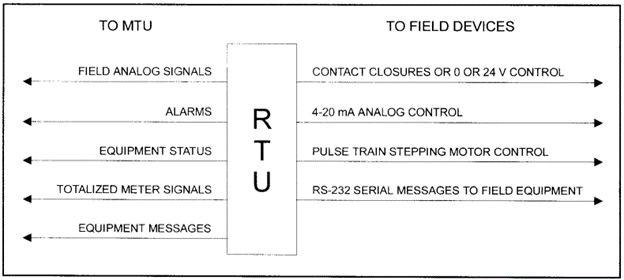
Gambar 7-2. Sinyal yang Meninggalkan RTU
7-2. Communications interface
Gambar 7-3 memperluas deskripsi kotak hitam dari RTU. RTU modern pada dasarnya adalah mikrokomputer dengan peralatan khusus di satu ujung yang dirancang untuk berinteraksi dengan tautan komunikasi dan dengan peralatan khusus di ujung lainnya untuk berinteraksi dengan sensor, aktuator, dan kalkulator dalam prosesnya. Saat RTU dalam mode terima, bagian dari peralatan antarmuka komunikasi (modem) menerima sinyal serial dari media komunikasi. Sinyal ini dikondisikan ke aliran bit yang baik satu atau nol. Pada tahap ini, sinyal tidak analog, meskipun beberapa sinyal analog mungkin telah dikodekan ke dalam biner untuk transmisi ke RTU. Menggunakan aturan yang ditetapkan ketika protokol komunikasi dikembangkan, bagian lain dari antarmuka komunikasi menafsirkan string satu dan nol dan meneruskan informasi ke RTU lainnya.
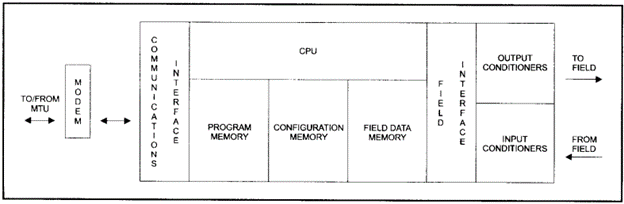
Gambar 7-3. Deskripsi Kotak Hitam yang Diperluas dari RTU
Perhatikan bahwa dalam beberapa kasus fungsi interpretasi dilakukan oleh mikroprosesor yang membentuk jantung RTU. Ketika jenis arsitektur ini digunakan, bagian dari program yang menerjemahkan satu dan nol menjadi informasi yang berguna disebut program “protocol driver”. Juga, untuk arsitektur ini, fitur interupsi, yang sangat penting untuk pengoperasian RTU, harus dieksekusi dengan cepat atau harus ada buffer untuk menyimpan pesan yang masuk. Jika bit atau bit pertama dari sebuah pesan tidak dikenali, pesan tersebut sering kali tidak dipahami. RTU tidak tahu kapan pesan akan dikirim ke sana. Itu harus selalu dalam mode mendengarkan (kecuali saat transmisi). Namun, saat mendengarkan RTU akan melakukan banyak hal lain. RTU awal menggunakan sirkuit elektronik yang didedikasikan untuk mendengarkan pesan masuk secara terus-menerus, mendekodekannya, menyimpannya dalam memori buffer, dan meneruskan informasi terkait ke seluruh RTU saat RTU memintanya. RTU modern menyelesaikan fungsi ini dengan program driver protokol yang dijalankan oleh CPU RTU (unit prosesor pusat).
7-3. Protocol Detailed
Protokol telah dibahas di Bab 6, tetapi mungkin berguna untuk menggunakan contoh untuk meninjau bagaimana pesan sederhana diterima dan diterjemahkan di RTU. Ingatlah bahwa informasi diterima di modem yang terletak di RTU sebagai rangkaian satu dan nol yang dimodulasi ke frekuensi pembawa. Modem melepaskan pembawa dan membuat serangkaian satu dan nol tersedia untuk RTU. Untuk keperluan diskusi ini, protokol akan didasarkan pada ANSI/IEEE C37.1-1979. Akan tetapi, banyak protokol lain yang ada, dan pemilihan protokol khusus ini tidak penting untuk diskusi ini.
Yang penting adalah Anda mempelajari seberapa banyak detail yang ada dalam definisi protokol.
Pada Gambar 7-4 (dan semua gambar lain yang serupa) informasi paling kiri adalah yang pertama diterima. Gambar 7-4 menunjukkan tiga bidang dasar dalam pesan biner. Mereka adalah “pembuatan pesan”, “informasi”, dan “penghentian pesan”. Untuk contoh yang ditunjukkan pada gambar, pembentukan pesan dan penghentian pesan memiliki panjang yang tetap. Bidang informasi mungkin memiliki panjang yang berbeda.
Bidang “pembuatan pesan” memiliki dua subbidang, seperti yang ditunjukkan pada Gambar 7-5. Yang pertama disebut "Sinkronisasi" (untuk sinkronisasi) dan panjangnya satu "oktet" atau delapan bit (00010100). Ini menetapkan bahwa MTU mengirim pesan ke RTU. Subbidang ini juga digunakan untuk menyinkronkan jam RTU ke jam MTU. Subbidang kedua, "Alamat Jarak Jauh," menentukan RTU mana yang dikirimi pesan oleh MTU. Ini juga terdiri dari delapan bit. Biasanya, delapan bit akan memungkinkan dua-ke-delapan-kekuatan atau 256 RTU untuk ditangani, tetapi hanya 254 dari alamat ini yang valid (0 dan 255 dicadangkan). Alamat dalam gambar ini, 00001011, diterjemahkan ke RTU nomor 11. Kecuali kedua subbidang dikenali, RTU mengetahui bahwa pesan tidak ditujukan padanya, mengabaikan sisa pesan, dan me-reset register pembentukan pesannya untuk menunggu pesan lain . RTU dengan alamat yang cocok mendengarkan tahap berikutnya, yaitu "informasi."
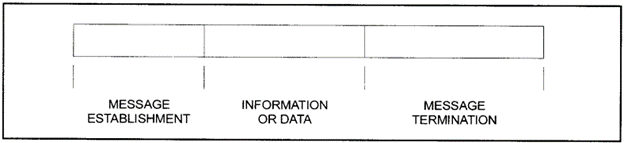
Gambar 7-4. Tiga Bidang Dasar dalam Pesan Biner
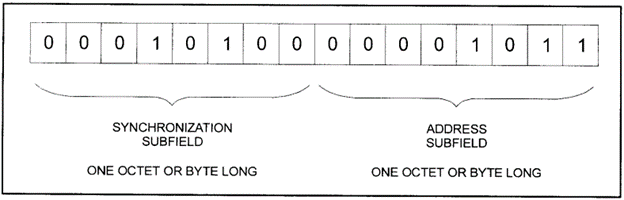
Gambar 7-5. Bidang "Pembentukan Pesan" Memiliki Dua Subbidang
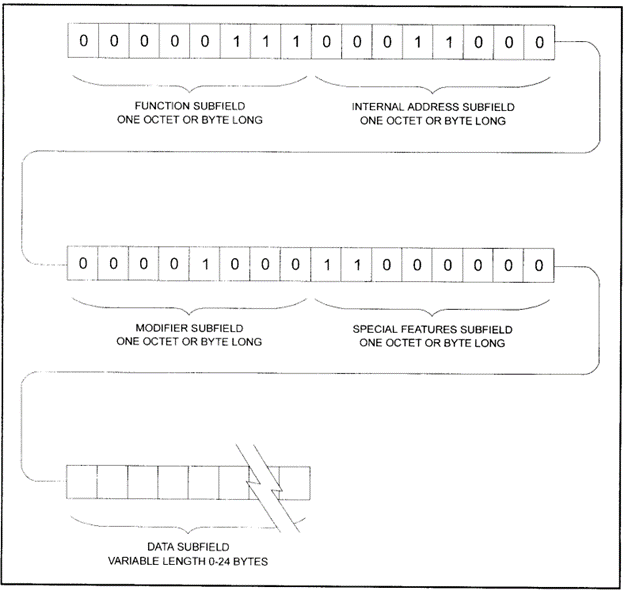
Bidang "informasi" yang ditunjukkan pada Gambar 7-6 terdiri dari beberapa sub bidang data yang ingin diteruskan MTU ke RTU. Subbidang pertama, "Fungsi," mendefinisikan jenis respons yang harus dilakukan RTU terhadap pesan ini atau jenis pesan kontrol yang sekarang ditransmisikan MTU. Ada delapan bit dalam subbidang ini, jadi ada dua per delapan daya atau 256 tanggapan potensial yang dapat diminta dan/atau 256 jenis pesan kontrol yang dapat dikirim. Contoh pesan kontrol mungkin bilangan biner tujuh, yang bisa berarti "Tutup semua katup berikut." Contoh pesan permintaan respons mungkin "Kirim nilai aliran total untuk mengukur fluida."
Gambar 7-6. Bidang Informasi
Subbidang "Alamat Internal" mengidentifikasi lokasi di dalam RTU. Misalnya, subbidang ini mungkin mengatakan "24," yang berarti bahwa register memori 24 adalah lokasi pertama dari total meter cairan yang akan dikirim, atau mungkin berarti "Katup yang diidentifikasi dalam register memori 24 adalah yang pertama dalam daftar katup untuk menutup.” Subbidang ketiga, "Modifier," mendefinisikan jumlah Bab data yang akan ditransfer. Dalam contoh ini, jika pengubahnya delapan, MTU akan meminta total dari meter 24 hingga 31 (24 + 8), inklusif, dikirim. Atau mungkin berarti "Delapan katup termasuk dan setelah yang diidentifikasi dalam register memori 24 adalah yang akan ditutup."
Subbidang keempat, "Pesanan Khusus," memungkinkan instruksi khusus ke RTU, termasuk mengatur ulang tanda masalah, mengatur ulang tanda kesalahan komunikasi, dan "Mengharapkan pesan panjang pada perintah berikutnya." Satu di posisi bit paling signifikan (sisi kiri) berarti bahwa MTU mengakui bahwa RTU telah menjalankan restart dan menginstruksikan RTU untuk mereset flag ini. Satu di MSB kedua berarti MTU mengakui bahwa RTU telah mendeteksi masalah terkait komunikasi dan menginstruksikan RTU untuk mengatur ulang tanda ini.
Bendera "Harap pesan panjang pada perintah berikutnya" layak mendapat penjelasan. Sebagian besar sistem SCADA melakukan lebih banyak pemantauan daripada pengendalian. Untuk alasan ini, pesan dari MTU ke RTU biasanya lebih pendek daripada pesan dari RTU ke MTU (dalam protokol ini). MTU akan mengingatkan RTU ketika akan mengirim pesan panjang yang menyertakan subbidang data ke RTU.
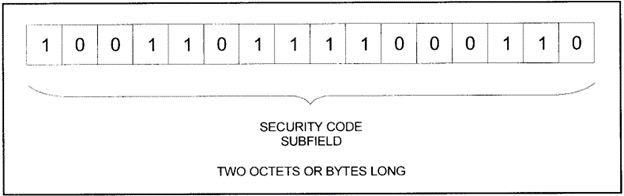
Subbidang kelima, "Data," menyediakan data umum yang akan dikirim dari MTU ke RTU. Untuk jenis pesan yang digunakan dalam contoh ini, subbidang data akan memiliki panjang nol. Untuk jenis pesan lain, panjangnya bisa mencapai dua puluh empat oktet. Setelah field informasi selesai, field “message terminator”, yang terdiri dari satu subfield, dimasukkan (lihat Gambar 7-7). Yang pertama, disebut "Kode Keamanan," terdiri dari enam belas bit yang dihitung di MTU berdasarkan informasi yang dikirim dari MTU. Angka enam belas bit ini dibandingkan dengan angka enam belas bit yang dihitung oleh RTU berdasarkan data yang diterimanya. Jika dua angka enam belas-bit identik, pesan dianggap telah RECeiVed dengan benar. Algoritma yang digunakan adalah cyclic redundancy code (CRC), yang telah kita bahas pada Bab 6.
Ketika seluruh pesan telah diterima dan dikonfirmasi sebagai benar, RTU, di samping semua hal lain yang telah dilakukan, akan melakukan instruksi yang terkandung dalam pesan yang baru saja diterima. Pesan terakhir ini mengharuskan sekelompok volume meter fluida tertentu yang terkandung dalam register 24-31 dikirim ke MTU. RTU sekarang akan merujuk ke register memorinya, mengeluarkan informasi yang sesuai, mengembangkan pesan ke MTU sesuai dengan aturan yang sama dan menggunakan protokol yang sama, dan memberi tahu MTU apa isi register tersebut.
Gambar 7-7. Bidang Terminator Pesan
7-4. Discrete Control
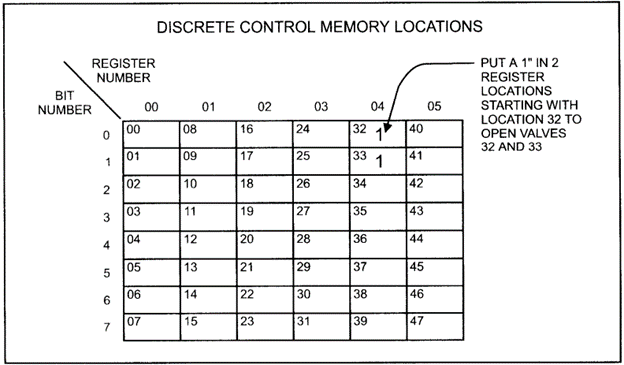
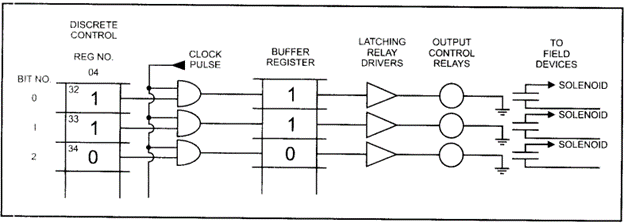
Banyak pesan dari MTU berhubungan dengan kontrol. Mereka akan membutuhkan RTU untuk mengembangkan dan mentransfer sinyal ke salah satu elemen medan di dekat lokasinya. Di bagian ini, pertama-tama kita akan mengikuti aktivitas yang terjadi jika pesan diterima oleh RTU yang memintanya untuk membuka katup dua posisi, ketika lokasi katup pertama di memori adalah lokasi memori 32 dan jumlah katup adalah dua . Lihat Gambar 7-8.
Gambar 7-8. Pesan ke RTU Memanggilnya untuk Membuka Katup Dua Posisi
RTU akan menemukan register yang dialokasikan untuk mengontrol katup diskrit. Perhatikan bahwa karena setiap register panjangnya satu oktet atau delapan bit dan setiap bit dapat menentukan posisi "tertutup" dengan "0" dan posisi "terbuka" dengan "1", setiap register dapat mengontrol delapan elemen diskrit. RTU akan menemukan posisi register pertama yang ditentukan (posisi 32 di register 04) dan memaksanya ke status "1". Kemudian akan pindah ke posisi kedua (33) dan memaksanya ke status "1". Beberapa milidetik kemudian register ini dibaca secara rutin (lihat Gambar 7-9). Pada titik ini, karena dua register ini memiliki "1" di posisinya, mereka akan menyebabkan dua posisi register buffer kontrol menjadi "1." A "1" pada posisi ini akan menyebabkan dua driver relay pada kartu keluaran mengunci dua relay tertutup. Masing-masing relai ini akan menggerakkan katup solenoida yang memungkinkan udara instrumen membuka salah satu katup. Perhatikan bahwa penguncian, baik pada driver relay atau relay itu sendiri, menyebabkan kontrol menjadi "Gagal ke posisi terakhir". Ini berarti bahwa jika sistem komunikasi gagal setelah pesan diterima untuk membuka katup, katup akan tetap terbuka. Jika diperlukan untuk menutupnya saat sistem SCADA tidak berfungsi, sistem instrumen manual atau keselamatan yang bertindak untuk mengesampingkan SCADA harus diterapkan.
Gambar 7-9. Pembacaan Rutin Posisi Register Yang Ditentukan Pertama
Prosedur yang sama akan digunakan untuk menghidupkan motor. Alih-alih memberi energi pada solenoida, relay pengunci akan menutup starter motor. Kebanyakan kontrol biner diskrit dapat dipengaruhi dengan cara ini.
7-5. Analog Control
Misalkan M EU menginstruksikan RTU untuk membuka katup, tidak sepenuhnya tetapi hanya hingga 75 persen terbuka lebar. Ini akan ditangani oleh instruksi kontrol analog. Untuk contoh ini, ditunjukkan pada Gambar 7-10, pesan MTU akan memanggil output analog, nomor register 22, dan mengaturnya pada +75 persen. Dalam hal ini, dibutuhkan lebih dari satu bit untuk mendefinisikan kebutuhan. Ilcgister 22 memiliki delapan bit, nomor yang sama dengan register 04 yang terakhir contoh. Sekarang, bagaimanapun, lebih banyak data diperlukan untuk menentukan tingkat keterbukaan katup. Delapan bit akan memungkinkan satu bagian dalam 28, atau satu dalam 256, yaitu sekitar 1/2 persen. Untuk banyak situasi kontrol ini cukup, dan delapan bit presisi biasanya digunakan. Aplikasi yang membutuhkan kontrol lebih presisi menggunakan sebagian atau seluruh register delapan bit kedua. Enam belas bit menghasilkan presisi satu banding dua pangkat enam belas, atau satu banding 65.536. Untuk contoh ini, delapan bit register analog dua puluh detik telah ditetapkan 11000000, yaitu 75 persen dari 256.
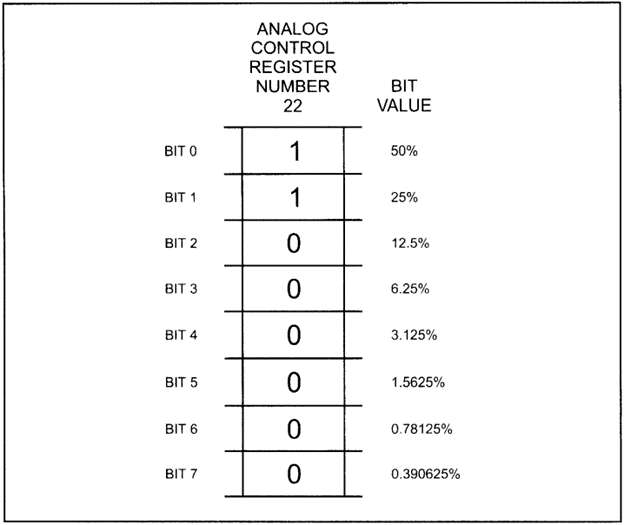
Gambar 7-10. Pesan MTU Panggilan untuk Output Analog, Daftar 22
Sekarang, ketika pulsa strobo jam datang dan nilai-nilai ini dipindahkan ke register buffer, sesuatu yang berbeda akan terjadi. Dalam kartu keluaran analog (Gambar 7-11), bit-bit ini harus disusun kembali menjadi sinyal analog. Untuk latihan ini, asumsikan bahwa 10 volt akan menyebabkan katup terbuka 100 persen, dan 0 volt akan menyebabkan katup terbuka 0 persen. Bit pertama (disebut bit 0) adalah bit paling signifikan (MSB). Karena itu adalah satu, itu menyalakan sumber tegangan yang menghasilkan 5 volt. Bit kedua (disebut bit 1) karena juga merupakan salah satu yang menyalakan sumber tegangan yang outputnya 2,5 volt. Bit ketiga (disebut bit 2) karena merupakan angka nol tidak menghidupkan sumber tegangan 1,25 volt. Yang keempat juga tidak menyalakan sumber 0,625 volt dan jadi timah. Semua tegangan ini ditambahkan, dan 7,5 volt yang dihasilkan diumpankan ke driver daya. Dari sini dapat diubah menjadi sinyal 4-20 mA. Ini akan menghasilkan (0,75 x (20 - 4) + 4) — 16 mA dikirim ke katup untuk memposisikan katup pada 75 persen dari posisi terbuka penuh.
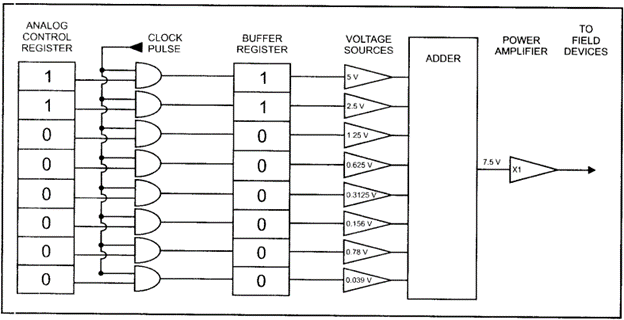
Gambar 7-11. Kartu Keluaran Analog
Faktanya, sinyal akan lebih mungkin untuk bertindak sebagai titik setel jarak jauh dari pengontrol PID (proporsional-integral-derivatif), dan output dari pengontrol dapat mengontrol katup, kisi-kisi, kecepatan mesin, atau sejumlah parameter yang dapat dijelaskan dengan nilai analog antara 0 dan 4 t)t) persen.
7-6. Pulse Control
Metode kontrol pulsa jarang digunakan dan tidak akan dibahas secara detail di sini. Ini memungkinkan motor stepper bertambah atau berkurang dengan sejumlah langkah tertentu. Register enam belas bit mungkin memiliki 0 bit yang disetel dengan satu untuk kenaikan atau nol untuk dikurangi. Salah satu dari lima belas bit yang tersisa akan disetel dengan satu bit untuk setiap keluaran pulsa yang direkam. Daripada mencatat semua bit secara bersamaan dari register buffer, mereka di-clock keluar satu per satu dan diatur untuk menuju motor stopper satu demi satu (berurutan). Salah satu alasan mengapa sistem ini tidak populer adalah karena setiap instruksi ke motor memerlukan pengetahuan tentang posisi awal motor. Pada waktunya, kesalahan akan menumpuk di posisi awal motor yang seharusnya. Oleh karena itu menjadi perlu untuk sebentar-sebentar memaksa motor baik terbuka penuh atau tertutup penuh untuk mendaftarkan kembali posisinya. Meskipun ini tidak terlalu sulit dari sudut pandang kontrol, dapat memiliki beberapa efek yang sangat destabilisasi pada proses.
saklar posisi umpan balik sekarang sedang diterapkan untuk menghilangkan masalah ini, tetapi kerusakan yang dilakukan oleh aplikasi awal yang buruk menjadikan ini metode kontrol yang tidak populer.
7-7. Serial Control
Banyak perangkat akhir dilengkapi dengan kemampuan input dan output serial. Kemampuan ini menyederhanakan pergerakan data antara register instrumen dan register RTU.
7-8. Monitor Discrete Signals
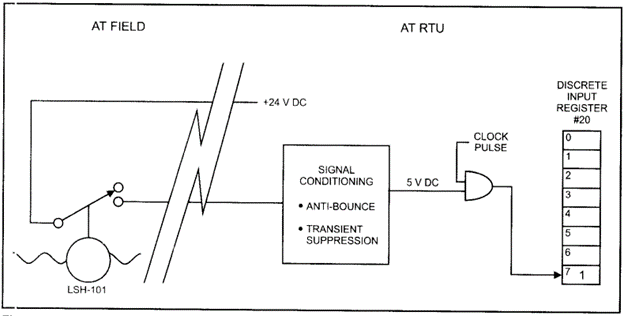
Salah satu fitur akuisisi data paling umum yang diminta untuk dilakukan oleh sistem SCADA adalah pemantauan status diskrit atau titik alarm. Ini kadang-kadang disebut titik digital. Perhatikan Gambar 7-12, yang merupakan representasi dari alarm diskrit—dalam hal ini sakelar tingkat tinggi pada reservoir pembangkit listrik tenaga air. Sisi penghapus saklar, LSH-101, disuplai dengan DC 24 volt dari RTU. Ketika ketinggian air cukup tinggi untuk membuka saklar, kabel balik yang membawa sinyal 24-volt memiliki sumber tegangan yang terputus ke beberapa sirkuit pengkondisi sinyal. Di sini, transien, kebisingan AC, dan efek pantulan kontak saklar dihilangkan, dan tegangan dipindahkan ke tingkat yang lebih kompatibel dengan tingkat logika. Sebuah pulsa clock mentransfer sinyal yang dikondisikan, dalam hal ini level +5 volt, ke dalam register input diskrit nomor 20, bit 7, sebagai "1." Lain kali MTU meminta RTU untuk status register input diskrit 20, bit 7, RTU akan melihat bit ini dan melaporkan bahwa itu adalah "1." MTU kemudian akan mengetahui bahwa ketinggian air di reservoir tinggi.
Tentu saja, jika ketinggian air rendah, sinyal 24 volt akan terus mencapai pengkondisi sinyal, dan keluaran pengkondisi sinyal akan menjadi nol volt. Ini akan dicatat ke dalam register sebagai "0." Sebuah "0" dalam register input diskrit 20, bit 7, akan dikonfigurasi untuk berarti bahwa tidak ada level tinggi di reservoir.
Input diskrit dapat menginformasikan status berbagai parameter. Level, tekanan, suhu, aliran, posisi katup, status motor, dan sebagainya dapat dipantau menggunakan saklar sederhana. Dengan menggunakan logika khusus dengan output kontak relay, dimungkinkan juga untuk mendapatkan status monitor radiasi tinggi, alarm gas yang mudah terbakar, analisis pH di luar batas, dan hampir semua hal lainnya.
Gambar 7-12. Alarm Terpisah
7-9. Monitor Analog Signals
Seringkali penting untuk memantau parameter proses untuk mendapatkan lebih dari jumlah informasi biner. Misalnya, ketinggian aktual cairan dalam reservoir, kecepatan motor, atau tingkat radiasi mungkin diperlukan. Dalam situasi ini disediakan sensor yang mengubah parameter yang diinginkan ke kuantitas yang lebih mudah dipantau, seperti arus.
Pada Gambar 7-13, pelampung di permukaan reservoir memodifikasi DC 24 volt yang disuplai oleh RTU sehingga, pada rentang yang menarik bagi kita, arus bervariasi dari 4 mA hingga 20 mA. Arus ini, diampunkan melalui resistor 250 ohm, menghasilkan tegangan x antara 1 volt dan 5 volt pada input rangkaian, yang melakukan pengkondisian sinyal dan kemudian mengambil sampel dan menahan tegangan. Sebuah konverter analog-ke-digital (ADC) kemudian beroperasi pada tegangan. Penjelasan rinci tentang bagaimana ini bekerja diberikan dalam Bagian 6.2. Hasilnya adalah kata delapan bit yang mewakili 1 volt hingga 5 volt hingga sekitar 1/2 persen. Jika akurasi yang lebih baik diperlukan, dan jarang, hingga enam belas bit dapat digunakan. Kata ini dimasukkan ke dalam Register tertentu, dan RTU, ketika diminta, akan mengirimkan isi register ke MTU.
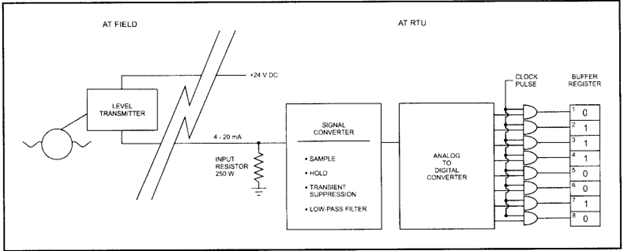
Gambar 7-13. Mengapung di Permukaan Reservoir Memodifikasi DC 24-volt yang Disuplai oleh RTU
7-10. Monitor Pulse Count Signals
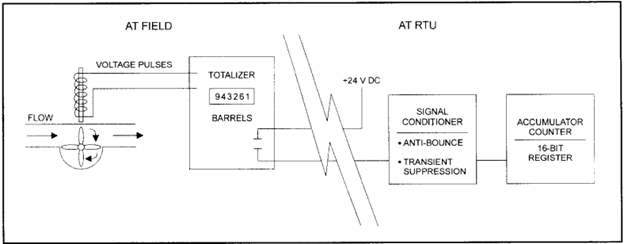
Banyak sensor atau instrumen lokal yang awalnya mengeluarkan informasinya dari pembacaan gaya odometer telah dimodifikasi untuk dibaca oleh SCADA. Seringkali, cara yang paling murah adalah dengan meminta perangkat mengirim serangkaian pulsa atau menginterupsi arus dari RTU dengan membuka dan menutup kontak relay sedemikian rupa sehingga setiap siklus buka-tutup mewakili jumlah yang tetap dan diketahui. Dengan cara ini, RTU dapat menghitung atau mengakumulasi penutupan kontak ini dan antar dari jumlah mereka berapa banyak perangkat telah diukur. Gambar 7-14 menunjukkan cara kerja perangkat tersebut.
Gambar 7-14. Pantau Sinyal Hitungan Pulsa
Sebuah penghitung, yang merupakan perangkat eksternal ke RTU, output penutupan kontak ftar setiap barel minyak yang melewati meter turbin. Penutupan kontak ini diberi energi oleh DC 24-volt dari RTU, dan sinyal intermiten dimasukkan ke dalam pengkondisi sinyal, lengkap dengan supresi transien dan sirkuit anti bounce. Namun, dalam kasus ini, output dari pengkondisi sinyal dilewatkan ke sirkuit pencacah yang terdiri dari flip-flop dan logika kemudi. Biasanya, penghitung akan memiliki enam belas bit sehingga dapat menghitung hingga dua hingga enam belas daya (65.536) Bab teknik. Beberapa RTU menyertakan fungsionalitas penghitung internal untuk diri mereka sendiri.
Nomor ini harus digunakan pada tahap desain, dalam hubungannya dengan periode pemindaian dan tingkat kesulitan pengiriman operator ke fasilitas, untuk menentukan Bab teknik yang seharusnya. Untuk contoh ini, Bab teknik yang diwakili oleh satu hitungan bisa menjadi 1/1000 a barrel, 1/ lt) per barel, 1 barel, atau 100 barrel. Jika sumur minyak menghasilkan sekitar 65 barel minyak per jam dan periode pemindaian adalah satu jam, akan menjadi rancangan yang buruk jika setiap hitungan mewakili 1/1000 barel. Akan ada kasus di mana ada ketidakpastian, dari satu pemindaian ke pemindaian berikutnya, apakah sumur itu telah menghasilkan 10/10.000 atau (67.5.536 + 10)/10.000 per barel. Akan lebih baik jika setiap bit register mewakili 1/100 barel atau bahkan 1/10 barel. Kemudian, beberapa jam kegagalan daya dan beberapa kesalahan komunikasi berturut-turut masih akan memberi Anda cukup waktu untuk mengirim operator ke RTU untuk membaca total secara manual sebelum penghitung berputar ke nol dan pengukuran oli hilang selamanya.
7-11. Monitor Serial Signals
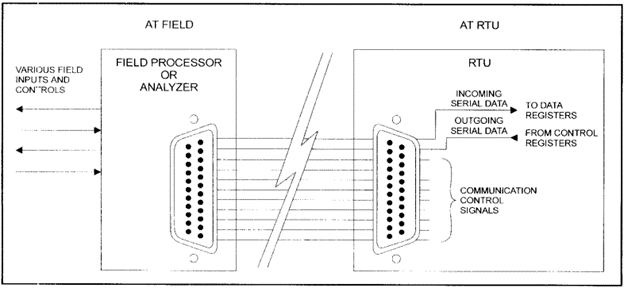
Sinyal serial adalah jenis sinyal terakhir yang dapat dimasukkan ke RTU oleh perangkat lapangan yang akan kita bahas di Bab ini. Seperti kebanyakan input analog dan pulsa, sinyal serial dikirim ke RTU dari semacam prosesor elektronik. Ini akan sangat sering menjadi perangkat yang kompleks seperti mesin penganalisis ibrasi atau kromatografi aliran proses. Biasanya, sinyal sir sinyal dapat disajikan dalam bentuk sinyal analog, tetapi karena sinyal ada di dalam prosesor elektronik sebagai sinyal digital, lebih mudah untuk memindahkannya sebagai sinyal digital serial.
Sambungan fisika l yang digunakan sering kali merupakan tautan RS-232, seperti yang ditunjukkan pada Gambar 8- 15. Bertindak sebagai master, RTU memberi sinyal pada perangkat lapangan untuk merespons; perangkat mengidentifikasi dirinya sendiri dan mengirim pesan serial dengan format yang sangat tetap, pada dasarnya memberi tahu RTU semua yang diketahuinya. RTU menyimpan data ini dalam register saat masuk. \Saat MTU memindai RTU, RTU menyertakan informasi ini dengan semua yang dikirimkannya.
Gambar 7-15. Tautan RS-232
7-12. Non-RTU Functions
Fungsi RTU adalah fungsi yang dilakukan RTU sebagai RTU. Selain itu, beberapa RTU yang memiliki kemampuan komputasi dapat diprogram untuk melakukan fungsi lain. Sebelum memutuskan untuk memprogram RTU tersebut untuk melakukan hal lain, Anda harus berhati-hati agar tidak memuat terlalu banyak ke RTU. Kekhawatiran potensial termasuk membebani CPU, memaparkan peralatan ke transien listrik, memaparkan perangkat lunak kepada orang-orang yang mengembangkan program baru, dan memenuhi persyaratan peraturan yang melibatkan stabilitas data.
Latihan:
1. Sebuah RTU dapat mengumpulkan data dalam bentuk posisi saklar diskrit. Ini digunakan untuk alarm dan pemantauan status. Apa tiga bentuk lain dari data lapangan yang dapat dikumpulkan oleh RTU?
2. Empat bentuk sinyal apa yang dapat dihasilkan RTU untuk mengontrol peralatan medan?
3. Apa fungsi dari program driver protokol?
4. Banyak protokol membagi pesan biner ke dalam bidang. Apakah mereka?
5. Apa tujuan dari kode keamanan?
6. Beberapa protokol mengizinkan pesan dengan panjang yang berbeda. Bagaimana RTU mengetahui bahwa ia menerima semua informasi?
7. Mengapa Anda tidak membutuhkan enam belas bit dalam register untuk menentukan posisi katup?
8. Input serial ke dan output dari RTU menjadi semakin populer. Mengapa?
9. Apa tujuan dari menghitung aliran?
Last modified: Tuesday, 13 June 2023, 2:35 PM
