 STECHOQ TRAINING CENTER
STECHOQ TRAINING CENTER
Day 1 - Pendahuluan
1.0 Pengantar Pembelajaran
Pada Basic Actuator ; Motor Sizing ini, anda akan mempelajari tentang motor listrik dan penggunaannya di Industri. Motor Listrik merupakan salah satu alat yang paling banyak digunakan, terutama di Industri 4.0 seperti sekarang dengan pesatnya perkembangan sistem elektromekanik. Sebagai mechanical engineer, anda akan berurusan dengan motor listrik di Industri apapun. Seorang mechanical engineer dapat bertanggungjawab untuk memilih motor berdasarkan spesifikasi yang diperlukan dengan biaya yang efisien.
Untuk itu, tujuan pembelajaran dari mata kuliah ini diantaranya :
Mengenal Jenis-Jenis Motor Listrik beserta Aplikasinya di dunia Industri
Memahami spesifikasi motor listrik dan karakteristik operasi dari setiap jenis motor
Mempelajari cara-cara pemilihan motor berdasarkan aplikasinya
Mempelajari cara menentukan ukuran motor (motor size) untuk berbagai aplikasi
1.1 Pendahuluan Motor
Motor listrik termasuk kedalam kategori mesin listrik dinamis dan merupakan sebuah perangkat elektromagnetik yang mengubah energi listrik menjadi energi mekanik. Pada motor listrik tenaga listrik dirubah menjadi tenaga mekanik. Perubahan ini dilakukan dengan merubah tenaga listrik menjadi magnet yang disebut sebagai elektromagnet. Sebagaimana kita ketahui bahwa kutub-kutub dari magnet yang senama akan tolak-menolak dan kutub-kutub tidak senama akan tarik-menarik. Maka kita dapat memperoleh gerakan jika kita menempatkan sebuah magnet pada sebuah poros yang dapat berputar dan magnet yang lain pada suatu kedudukan.
Energi mekanik dari putaran ini digunakan untuk keperluan di dunia industri dan rumah tangga. Untuk keperluan di industri misalnya untuk memutar impeller pompa, fan atau blower, menggerakan kompresor, mengangkat bahan/material dan lain-lain. Sedangkan untuk keperluan rumah tangga misalnya mixer, bor listrik, kipas angin dan lain-lain. Motor listrik yang umum digunakan di dunia industri adalah motor listrik asinkron, dengan dua standar global yakni International Electrotechnical Commission (IEC) dan National Electric Manufacturers Association (NEMA). Motor asinkron IEC berbasis metrik (milimeter), sedangkan motor listrik NEMA berbasis imperial (inch), dalam aplikasi ada satuan daya dalam horsepower (hp) maupun kiloWatt (kW). Motor listrik kadang disebut juga dengan kuda kerjanya industri, sebab diperkirakan bahwa industi-industri sekitar 70% menggunakan motor-motor listrik untuk menyelesaikan pekerjaan-pekerjaan tersebut. Penggunaan motor listrik saat ini sudah menjadi kebutuhan kita sehari-hari untuk menggerakkan peralatan dan mesin yang membantu dan menyelesaikan perkerjaan manusia. Penggunaan motor listrik ini semakin berkembang karena memiliki keunggulan dibandingkan motor bakar, misalnya kebisingan dan getaran lebih rendah, kecepatan putaran motor bisa diatur, lebih bersih, lebih kompak, dan hemat dalam pemeliharaan.
Agar pengunaan motor listrik tersebut dapat berfungsi dengan baik, maka sebagai pengguna kita diharapkan untuk dapat memahami konsep dasar dari motor-motor listrik tersebut minimal tentang pengertiannya, fungsi dan kegunaannya serta jenis-jenis motor listrik tersebut. Sehingga dalam modul day 1 ini akan dibahas hal-hal dasar tersebut sehingga menjadi arahan pola berpikir kita untuk memahami modul-modul selanjutnya, sehingga materi motor-motor listrik yang akan disajikan selanjutnya dapat diterima, dipahami dan diaplikasikan di dunia profesional/industri.
1.2 Jenis-Jenis Motor Listrik
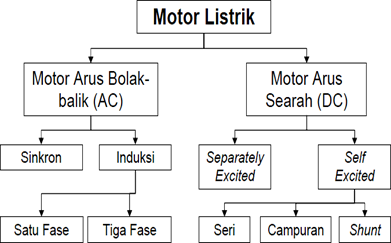
Dibawah ini adalah bagan mengenai macam-macam motor listrik berdasarkan pasokan input, konstruksi, dan mekanisme operasi yang terangkum dalam klasifikasi motor listrik. Secara umum motor listrik ada 2 yaitu motor listrik AC dan motor listrik DC. Motor listrik AC dan motor listrik DC juga terbagi lagi menjadi beberapa bagian-bagian lagi, jika digambarkan maka akan terlihat seperti pada gambar di bawah ini.
1.3 Konstruksi Motor Listrik
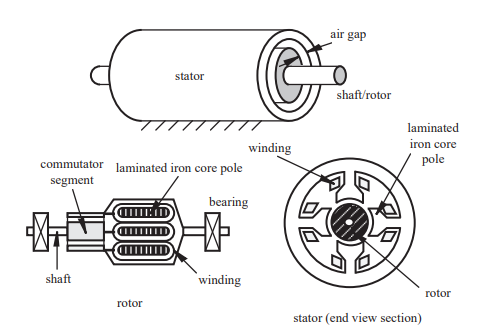
Gambar di atas mengilustrasikan konstruksi dan komponen dari rangkaian listrik motor biasa. Housing (rumah) luar stasioner, yang disebut stator, menyokong magnet kutub radial. Kutub-kutub ini terdiri dari magnet permanen atau gulungan kawat, yang disebut medan kumparan, melilit inti besi yang dilaminasi. Tujuan dari kutub stator adalah untuk menyediakan medan magnet radial. Inti besi mengintensifkan medan magnet di dalam kumparan karena permeabilitasnya. Tujuan untuk melaminasi inti adalah untuk mengurangi efek arus eddy, yang diinduksi dalam bahan konduktor. Rotor adalah bagian dari motor yang berputar. Ini terdiri dari putaran poros yang ditopang oleh bantalan, kumparan penghantar biasanya disebut sebagai angker belitan, dan inti besi yang memperkuat medan yang diciptakan oleh belitan.
Ada celah udara kecil antara rotor dan stator di mana medan magnet berinteraksi. Di banyak motor DC, rotor juga mencakup komutator yang mengalirkan dan mengontrol arah arus melalui belitan jangkar (koil). Untuk motor dengan komutator, "brush" memberikan kontak listrik stasioner ke segmen konduksi komutator yang bergerak. Brush pada motor awal terdiri dari bulu kawat tembaga yang dilenturkan terhadap komutator, oleh karena itu disebut brush; tapi sekarang mereka biasanya terbuat dari grafit, yang menyediakan area kontak yang lebih besar dan melumasi sendiri. Sikat biasanya pegas untuk memastikan kontak terus-menerus dengan komutator. Video berikut menunjukkan motor DC brush kecil tipe permanent magnet, dibongkar sehingga Anda dapat melihat berbagai komponen dan cara kerjanya.
Motor DC brushless memiliki magnet permanen pada rotor dan medan putar pada stator. Magnet permanen pada rotor menghilangkan kebutuhan akan komutator. Sebaliknya, arus DC di kumparan stator diaktifkan sebagai respons terhadap sensor jarak yang dipicu saat poros berputar. Salah satu keuntungan dari motor brushless adalah tidak memerlukan perawatan untuk mengganti brush yang aus. Juga, karena tidak ada belitan rotor atau inti besi, inersia rotor jauh lebih kecil, terkadang membuat kontrol lebih mudah. Juga tidak ada masalah disipasi panas rotor, karena tidak ada belitan rotor dan karenanya tidak ada pemanasan I2R. Keuntungan lain dari tidak memiliki sikat adalah bahwa tidak ada busur yang terkait dengan pergantian mekanis. Oleh karena itu, motor tanpa sikat menghasilkan lebih sedikit EMI dan lebih cocok di lingkungan di mana gas eksplosif mungkin ada. Salah satu kelemahan motor brushless adalah harganya lebih mahal karena sensor dan sirkuit kontrol yang diperlukan.
Gambar di bawah menunjukkan contoh assembly motor yang tersedia secara komersial. Pada gambar atas, motor di sebelah kiri adalah motor induksi AC 3 fasa yang digunakan di industri. Motor di sebelah kanan adalah motor stepper dua fasa. Motor datang dalam ukuran standar dengan braket pemasangan standar, dan biasanya menyertakan papan nama yang mencantumkan beberapa spesifikasi motor. Gambar di bawah menunjukkan konstruksi internal motor stepper dengan rotor magnet permanen.



1.4 Prinsip Kerja Motor Listrik
Torsi dihasilkan oleh motor listrik melalui interaksi medan stator dan arus jangkar atau medan stator dan medan jangkar. Kami mengilustrasikan kedua prinsip dimulai dengan yang pertama. Apabila sebuah konduktor yang dialiri arus berada pada medan magnet maka akan timbul gaya yang disebut Gaya Lorentz. Rumusan Gaya Lorentz adalah :
di mana F adalah vektor gaya (per satuan panjang konduktor), I adalah vektor arus, dan B adalah vektor medan magnet. Gambar berikut mengilustrasikan hubungan antara vektor-vektor ini dan menunjukkan analogi aturan tangan kanan, yang menyatakan bahwa jika jari telunjuk tangan kanan Anda menunjuk ke arah arus dan jari tengah Anda sejajar dengan arah medan, maka ibu jari Anda yang diperpanjang ( tegak lurus dengan telunjuk dan jari tengah) akan menunjuk ke arah gaya. Cara lain untuk menerapkan aturan tangan kanan adalah dengan menyelaraskan jari-jari Anda yang diperpanjang ke arah vektor I dan mengarahkan telapak tangan Anda sehingga Anda dapat menggulung (melenturkan) jari-jari Anda ke arah vektor B. Tangan Anda kemudian akan diposisikan sedemikian rupa sehingga ibu jari Anda yang diperpanjang menunjuk ke arah F.

Gambar di bawah mengilustrasikan motor DC dengan enam belitan jangkar. Arah aliran arus dalam belitan diilustrasikan pada gambar.

Sebagai hasil dari Persamaan 1.1, interaksi medan stator tetap dan arus dalam belitan jangkar menghasilkan torsi dalam arah berlawanan arah jarum jam. Anda dapat memverifikasi arah torsi ini dengan menerapkan aturan tangan kanan pada arus jangkar dan arah medan stator. Untuk mempertahankan torsi saat rotor berputar, pengaturan spasial arus jangkar relatif terhadap medan stator harus tetap. Sebuah komutator menyelesaikan ini dengan mengalihkan arus pada belitan jangkar dalam urutan yang benar saat rotor berputar.
Gambar di bawah mengilustrasikan contoh komutator. Ini terdiri dari cincin bahan konduktif dan isolasi bolak-balik yang terhubung ke belitan rotor. Arus diarahkan melalui belitan melalui sikat, yang meluncur di permukaan komutator saat berputar. Pada posisi yang ditunjukkan, arus mengalir melalui belitan A, B, dan C searah jarum jam dan melalui F, E, dan D berlawanan arah jarum jam

Ketika rotor berputar searah jarum jam seperenam putaran penuh dari posisi yang ditunjukkan, arus pada belitan C dan F beralih arah. Saat sikat (brush) meluncur di atas komutator yang berputar, proses ini berlanjut secara berurutan. Dengan konfigurasi belitan yang sesuai, komutator mempertahankan pengaturan spasial yang konsisten dari arus relatif terhadap medan stator tetap. Ini terus mempertahankan torsi ke arah yang diinginkan.
Metode lain dimana motor listrik dapat menciptakan torsi adalah melalui interaksi medan magnet stator dan rotor. Torsi dihasilkan oleh fakta bahwa kutub-kutub medan yang sejenis akan tarik menarik dan kutub-kutub yang tidak sejenis akan tolak-menolak. Gambar di bawah mengilustrasikan prinsip operasi ini dengan motor DC dua kutub sederhana. Kutub stator menghasilkan medan magnet tetap dengan magnet permanen atau kumparan yang membawa arus DC.

Belitan pada rotor dikomutasi untuk menyebabkan perubahan arah medan magnetnya. Interaksi medan rotor yang berubah dan medan stator tetap menghasilkan torsi pada poros, menyebabkan rotasi. Dengan rotor pada posisi i, sikat kanan menyentuh segmen komutator A dan sikat kiri menyentuh segmen B, menciptakan arus pada belitan rotor, menghasilkan kutub magnet seperti yang ditunjukkan. Kutub magnet rotor menentang kutub magnet stator, menciptakan torsi yang menyebabkan gerakan rotor searah jarum jam. Pada posisi ii, kutub stator berlawanan dan menarik kutub rotor untuk meningkatkan putaran searah jarum jam. Antara posisi iii dan v kontak komutator beralih, mengubah arah arus rotor dan karenanya arah medan magnet. Pada posisi iv, kedua sikat untuk sementara kehilangan kontak dengan komutator, tetapi rotor terus bergerak karena momentumnya. Pada posisi v medan magnet terbalik di rotor kembali melawan medan stator, melanjutkan torsi dan gerakan searah jarum jam.
Masalah dengan desain dua kutub sederhana yang diilustrasikan pada Gambar sebelumnya adalah bahwa penyalaan tidak akan terjadi jika motor berada pada posisi iv, di mana sikat ditempatkan di atas celah komutator. Masalah ini dapat dihindari dengan merancang motor dengan lebih banyak kutub dan lebih banyak segmen komutator dengan switching yang tumpang tindih. Ini memungkinkan kuas untuk selalu menghubungi dua segmen aktif, bahkan saat berpindah.
Masalah lain yang tidak dibahas dengan model sederhana ini adalah gaya gerak listrik balik (ggl) dan induksi. Saat belitan rotor memotong medan magnet stator, ggl balik diinduksi berlawanan dengan tegangan yang diberikan ke rotor. Juga, ketika komutator mengubah arah arus, tegangan diinduksi untuk menentang perubahan arah arus.
Prinsip operasi motor AC serupa mengenai interaksi medan magnet, tetapi pergantian tidak diperlukan. Ini karena medan magnet berputar di sekitar stator sebagai akibat dari tegangan AC dan susunan kumparan di sekitar rumah stator. Gulungan rotor motor AC asinkron tidak memiliki tegangan eksternal yang diterapkan; sebaliknya, tegangan diinduksi dalam belitan rotor karena medan putar di sekitar stator. Rotor berputar pada kecepatan yang lebih lambat daripada medan stator yang berputar (ini disebut slip), memungkinkan terjadinya induksi, oleh karena itu disebut asinkron. Karena tindakan ini, motor asinkron kadang-kadang disebut sebagai mesin induksi. Dengan motor AC sinkron, belitan rotor diberi energi tetapi melalui cincin slip bukan komutator. Sikat memberikan kontak konstan tanpa gangguan dengan cincin slip, menyebabkan medan berputar di sekitar belitan rotor pada kecepatan yang sama dengan medan berputar di sekitar stator. Karena interaksi medan ini, rotor berputar pada kecepatan yang sama dengan medan stator, maka disebut sinkron.
Pada semua motor listrik, putaran dihasilkan akibat adanya torsi pada rotor. Torsi ini terjadi akibat gaya lorentz yang bekerja pada kumparan motor. Daya motor (W) didapat dengan mengalikan Torsi motor (Nm) dan kecepatan putar motor (rad/s) atau dapat diekspresikan dalam persamaan berikut :
P=T⋅ω
dengan :
P = Daya motor (W)
T = Torsi motor (Nm)
ω = Kecepatan putar motor (rad/s)
Selain dalam rad/s, kecepatan putar juga biasa dinyatakan dalam satuan putaran permenit (revolution per minute) atau rpm. Konversi antar satuan tersebut dapat dilakukan dengan persamaan berikut :

dengan :
n = Kecepatan putar motor dalam rpm
Sementara itu, daya listrik yang dibutuhkan oleh motor dapat dicari dengan mengalikan tegangan dan arus listrik yang disupply ke motor. Berbeda dengan daya mekanik, daya listrik adalah energi yang dibutuhkan motor. Karena motor mengubah energi listrik menjadi energi mekanik, maka masukannya adalah daya listrik, sementara keluarannya adalah daya mekanik. Dalam konversi ini, tentu ada energi yang hilang akibat panas atau gesekan, sehingga efisiensi motor dapat dihitung, Motor dengan kondisi baik biasanya dapat beroperasi dengan efisiensi diatas 90%.
Pelectric = V⋅I
dengan :
Pelectric = Daya listrik (W)
V = Tegangan supply (Volt)
I = Arus listrik (A)

Untuk menambah pemahaman anda tentang motor listrik dan cara kerjanya silahkan lihat video youtube berikut :
1. Cara kerja motor listrik :
2. Motor listrik Tesla :
3. Jenis-jenis motor listrik :
4. Jenis-jenis motor listrik AC :
Last modified: Thursday, 16 February 2023, 3:54 PM
