 STECHOQ TRAINING CENTER
STECHOQ TRAINING CENTER
Day 2 - Motor Listrik AC & DC
2.1 Pengantar Motor DC
Motor Induksi lengkap :
Motor arus searah (Motor DC) telah ada selama lebih dari seabad. Keberadaan motor DC telah membawa perubahan besar sejak dikenalkan motor induksi, atau terkadang tersebut AC shunt motor. Motor DC telah memunculkan silicon controller rectifier yang digunakan untuk memfasiitasi control kecepatan pada motor. Mesin listrik dapat berfungsi sebagai motor listrik apabila didalam motor listrik tersebut terjadi proses konversi energy listrik menjadi energy mekanik. Motor listrik merupakan perangkat elektromagnetis yang mengubah energy listrik menjadi energy mekanik. Motor DC memerlukan suplai tegangan yang searah pada kumparan jangkar dan kumparan medan untuk diubah menjadi energy mekanik. Pada motor DC kumparan medan disebut startor (bagian yang berputar). Motor DC sering dimanfaatkan sebagai penggerak pintu bergeser otomatis dan dalam rangkaian robot sederhana.
Motor DC memiliki fungsi yang sangat banyak dalam kehidupan sehari-hari dan dalam kehidupan dunia industry. Motor DC memudahkan pekerjaan sehingga proses industry dapat berjalan efisien. Semakin banyak industry yang berkembang maka akan semakin banyak mesin yang digunakan. Semakin banyak mesin yang digunakan, maka semakin banyak penggunaan motor DC.Oleh karena itu sangat penting untuk mengetahui dan mengerti motor DC, prinsip kerja, jenis-jenis motor DC, aplikasi dan perhitungan motor DC.
Pada Bab ini akan dibahas secara rinci hal-hal yang berkaitan dengan pengertian motor DC, kegunaan motor DC, konstruksi/struktur motor DC, bagian-bagian motor DC dan fungsinya, prinsip kerja motor DC, jenis-jenis motor DC dan efisiensi motor DC.
Kegunaan Motor DC dalam kehidupan sehari-hari di gunakan pada
Dalam bidang industry dan pabrik, digunakan pada
2.2 Pengertian Motor DC
Motor DC meruapakan suatu mesin yang berfuungsi mengubah tenaga listrik arus searah menjadi gerak atau energy mekanik. Bagian utama motor DC adalah statos dan rotor dimana kumparan medan pada motor dc disebut stator (bagian yang tidak berputar) dan kumparan jangkar disebut rotor (bagian yang berputar).


Bentuk motor paling sederhana memiliki kumparan satu lilitan yang bisa berputar bebas di antara kutub-kutub magnet permanen. Catu tegangan dc dari baterai menuju ke lilitan melalui sikat yang menyentuh komutator, dua segmen yang terhubung dengan dua ujung lilitan. Kumparan satu lilitan pada gambar di atas disebut angker dinamo. Angker dinamo adalah sebutan untuk komponen yang berputar di antara medan magnet.

Motor arus searah merupakan salah satu mesin listrik yang mengubah energi listrik searah menjadi energi gerak. Motor arus searah banyak sekali dipakai, motor-motor kecil untuk aplikasi elektronik menggunakan motor arus searah seperti: pemutar kaset, pemutar piringan magnetik di harddisk komputer, kipas pendingin komputer, dan tentu saja mainan legendaris ‘tamiya’ menggunakan motor arus searah. Tentu saja untuk keperluan-keperluan yang berdaya besar, motor arus searah masih dipakai pada aplikasi tertentu.
2.3 Cara Kerja Motor DC
Gerak atau putaran yang dihasilkan oleh motor arus searah diperoleh dari interaksi dua buah medan yang dihasilkan oleh bagian ‘jangkar‘ (armature) dan bagian ‘medan‘ (field) dari motor arus searah. Pada gambar ilustrasi diatas, bagian medan berbentuk suatu kumparan yang terhubung ke sumber arus searah. Sedangkan bagian jangkar ditunjukkan sebagai magnet permanen (U-S), bagian jangkar ini tidak harus berbentuk magnet permanen, bisa juga berbentuk belitan yang akan menjadi elektro-magnet apabila mendapatkan sumber arus searah. Sehingga apabila motor arus searah kita berjenis jangkar belitan, maka kita harus menyediakan dua sumber arus searah, satu untuk bagian jangkarnya, satu lagi untuk bagian medannya. Bagian lain yang tidak kalah penting pada motor arus searah adalah adanya ‘komutator’ (comutator). Komutator merupakan suatu konverter mekanik yang membuat arus dari sumber mengalir pada arah yang tetap walaupun belitan medan berputar. Komutator berpasangan dengan ‘cincin belah‘ (slip-rings) untuk menjalankan tugas yang saya sebut baru saja. Pada gambar ilustrasi diatas, gambar lingkaran yang dibagi menjadi dua buah dan terhubung ke bagian belitan medan merupakan cincin belah yang saya maksud. Bagian yang digambarkan berbentuk kotak menempel pada cincin belah tersebut yang dinamakan komutator. Tentu saja pada aplikasi yang sebenarnya, jumlah cincin belah tidak hanya dua dan terhubung ke sejumlah banyak belitan medan. Sekarang bagaimana putaran dapat dihasilkan??

Untuk menjawab ini, tentu saja kita harus ingat aturan tangan kanan bahwa gaya, medan magnet, dan arus membentuk suatu sumbu tiga dimensi seperti ditunjukkan di gambar sebelumnya. Semua setuju bahwa medan magnet berarah dari kutub Utara (N) ke kutub Selatan (S), sehingga di gambar yang atas seharusnya ada medan magnet yang berarah dari N ke S. Interaksi adanya arus dan medan magnet dengan menggunakan aturan tangan kanan mengakibatkan munculnya gaya. Pada gambar yang atas, dapat dicoba sendiri, di konduktor yang dekat dengan kutub S akan muncul gaya ke arah atas, sebaliknya pada konduktor yang dekat dengan kutub N akan muncuk gaya ke arah bawah. Akibatnya bagian medan akan berputar karena adanya dua gaya yang berlawanan arahnya. Setelah satu putaran maka konduktor yang tadinya dekat dengan kutub S akan berpindah dekat ke kutub N, dan juga sebaliknya. Akibat adanya pasangan cincin belah-komutator, arus akan mengalir dengan arah yang tetap, walaupun konduktornya berganti, sehingga gaya pada titik tersebut akan selalu tetap arahnya. Begitu seterusnya sehingga motor arus searah akan berputar pada arah yang tetap. Secara sederhana, apabila sumber arus searahnya kita balik arahnya maka putaran yang dihasilkan akan berlawanan arah (sehingga motor tamiya saya dulu berjalan mundur karena saya salah memasang baterainya.
Besarnya gaya dapat ditentukan dengan persamaan:

Karena kawat penghantar tersebut bergerak didalam medan magnet maka sesuai dengan percobaan Faraday, pada kawat penghantar tersebut akan terbentuk GGL Induksi. GGL induksi ini mempunyai arah melawan tegangan yang menyebabkan, sehingga GGL induksi ini sering disebut GGL lawan. Untuk menentukan GGL lawan Ea mempunyai persamaan dengan GGL induksipada generator arus searah yaitu:

2.4. Jenis-Jenis Motor DC
Jenis motor arus searah sama dengan jenis generator DC sebenarnya suatu mesin arus searah dapat di pakai sebagai generator dan dapat pula dipakai sebagai motor. Dengan membalikkan generator DC, dimana sekarang tegangan Vc menjadi sumber dan tegangan jangkar Eg merupakan GGL lawan. Generator DC ini akan berlaku sebagai motor DC oleh karena itu hubungan antara tegangan Vt dan Ea dapat ditulis sebagai berikut :

Berdasarkan bagaimana medan magnet stator dibuat, motor DC diklasifikasikan menjadi empat kategori: magnet permanen, luka shunt, luka seri, dan luka majemuk. Diagram berikut menjelaskan pengelompokan berbagai jenis motor DC :

a. Motor DC Magnet Permanen

Medan stator pada motor magnet permanen (PM) (lihat Gambar di atas) disediakan oleh magnet permanen, yang tidak memerlukan sumber daya eksternal dan karenanya tidak menghasilkan pemanasan I2R. Motor PM lebih ringan dan lebih kecil dari motor DC lain yang setara karena kekuatan medan magnet permanen tinggi. Motor PM mudah dibalik dengan mengubah arah tegangan yang diberikan, karena arah arus dan medan hanya berubah di rotor. Kurva karakteristik torsi vs kecepatan dan arus vs torsi dari motor DC magnet permanen sebagai berikut :

Motor PM ideal dalam aplikasi kontrol karena linearitas hubungan torsi-kecepatan. Desain pengontrol selalu lebih mudah bila aktuatornya linier karena analisis sistem sangat disederhanakan. Ketika motor digunakan dalam aplikasi kontrol posisi atau kecepatan dengan umpan balik sensor ke pengontrol, itu disebut sebagai servomotor. Motor PM hanya digunakan dalam aplikasi berdaya rendah karena daya pengenalnya biasanya dibatasi hingga 5 hp (3728 W) atau kurang, dengan peringkat tenaga kuda fraksional menjadi lebih umum. Motor DC PM dapat berupa motor brush, brushless, atau stepper.
b. Motor DC Shunt

Motor shunt (lihat gambar di atas) memiliki kumparan jangkar dan medan yang terhubung secara paralel, yang ditenagai oleh suplai yang sama. Arus beban total adalah jumlah arus jangkar dan arus medan. Motor shunt menunjukkan kecepatan yang hampir konstan pada rentang pembebanan yang besar, memiliki torsi awal sekitar 1,5 kali torsi operasi pengenal, memiliki torsi awal terendah dari semua motor DC, dan dapat dikonversi secara ekonomis untuk memungkinkan kecepatan yang dapat disesuaikan dengan menempatkan potensiometer di seri dengan gulungan medan.
Karakteristik torsi vs kecepan dan arus vs torsi Motor DC shunt dapat dilihat pada gambar berikut :

c. Motor DC Seri

Motor seri (lihat Gambar di atas) memiliki kumparan jangkar dan medan yang dihubungkan secara seri sehingga arus jangkar dan medan adalah sama. Motor seri menunjukkan torsi awal yang sangat tinggi, kecepatan yang sangat bervariasi tergantung pada beban, dan kecepatan yang sangat tinggi ketika beban kecil. Faktanya, motor seri besar dapat mengalami kegagalan yang sangat fatal ketika tiba-tiba diturunkan bebannya (misalnya, dalam aplikasi penggerak sabuk ketika sabuk gagal) karena gaya dinamis pada kecepatan tinggi. Ini disebut run-away. Selama motor tetap dibebani, ini tidak menimbulkan masalah. Kurva torsi-kecepatan untuk motor seri berbentuk hiperbolik, menyiratkan hubungan terbalik antara torsi dan kecepatan dan daya yang hampir konstan pada rentang yang luas.

d. Motor DC Compound

Motor kompon (lihat Gambar di atas) mencakup belitan medan shunt dan seri, menghasilkan karakteristik gabungan dari motor shunt dan seri. Sebagian dari arus beban melewati kumparan jangkar dan seri, dan arus beban yang tersisa hanya melewati kumparan shunt. Kecepatan maksimum motor kompon terbatas, tidak seperti motor seri, tetapi pengaturan kecepatannya tidak sebaik motor shunt. Torsi yang dihasilkan oleh motor kompon agak lebih rendah dari motor seri dengan ukuran yang sama.

Perhatikan bahwa, tidak seperti motor magnet permanen, ketika polaritas tegangan untuk motor DC shunt, seri, atau kompon diubah, arah putaran tidak berubah (yaitu, motor ini tidak dapat dibalik). Alasan untuk ini adalah bahwa polaritas stator dan rotor berubah karena gulungan medan dan jangkar dieksitasi oleh sumber yang sama.
2.5 Persamaan Motor DC
Seperti diilustrasikan pada Gambar di bawah, impedansi dinamo motor DC dapat dimodelkan sebagai resistansi R secara seri dengan kombinasi paralel induktansi L dan resistansi kedua RL. Namun, saat armature konduktor mulai berputar dalam medan magnet yang dihasilkan oleh stator, tegangan yang disebut ggl balik Vemf diinduksi dalam belitan armature yang berlawanan dengan tegangan yang diberikan. Back-emf sebanding dengan kecepatan motor dalam rad/s:
di mana konstanta proporsionalitas ke disebut konstanta listrik motor.

RL, rugi resistif ekivalen dalam sirkit magnetik, biasanya orde besarnya lebih besar dari R, resistansi belitan, dan dapat diabaikan. jika tegangan yang diberikan pada jangkar adalah Vin, arus yang melalui jangkar adalah Iin, dan jika kita asumsikan RL = 0, persamaan listrik untuk motor adalah

2.6 Persamaan Motor DC Permanent Magnet (PM)
Karena motor DC magnet permanen sangat penting dan paling mudah untuk dipahami dan dianalisis, kami melihat persamaan pengaturannya secara lebih rinci. Karena interaksi antara medan stator dan arus jangkar, torsi yang dihasilkan oleh motor DC PM berbanding lurus dengan arus jangkar:
di mana kt didefinisikan sebagai konstanta torsi motor. Konstanta listrik motor PM ke dan konstanta torsi kt adalah parameter yang sangat penting, dan sering dilaporkan dalam spesifikasi pabrikan. Ketika dinamika motor dan bebannya dipertimbangkan, torsi motor yang dihasilkan T diberikan oleh
di mana Ja dan JL adalah momen inersia kutub armature dan beban terpasang, Tf adalah torsi gesek yang melawan putaran armature (termasuk gaya hambat yang ditimbulkan oleh hambatan udara), dan TL adalah torsi yang dihamburkan oleh beban.
Ketika tegangan diterapkan ke motor DC PM, rotor berakselerasi sampai kondisi operasi kondisi tunak tercapai. Pada kondisi tunak, Persamaan 2.3 menjadi
Perhatikan bahwa, pada kondisi tunak, dari Persamaan 2.5, torsi motor menyeimbangkan torsi gesekan dan beban. Dengan memecahkan Iin dalam Persamaan 2.4 dan mensubstitusikan ke dalam Persamaan 2.6, kita mendapatkan
dan dengan memecahkan torsi motor dalam persamaan ini, kita mendapatkan
Persamaan ini memprediksi hubungan torsi-kecepatan linier untuk motor DC PM dengan tegangan tetap.
Gambar di bawah menunjukkan kurva kecepatan torsi linier dan kurva kecepatan daya untuk motor DC magnet permanen dengan tegangan suplai tetap Vin. Hubungan linier dalam Persamaan 10.8 juga dapat dinyatakan dalam torsi awal Ts dan kecepatan tanpa beban max sebagai
Kecepatan tanpa beban adalah kecepatan kondisi tunak di mana motor akan berjalan jika tidak ada torsi beban (TL = 0). Pada kecepatan ini, torsi motor menyeimbangkan torsi gesekan (yaitu, T = Tf).

Dengan membandingkan Persamaan 2.8 dan 2.9, Anda dapat melihat bahwa torsi stall dan kecepatan tanpa beban terkait dengan parameter motor menurut
dan
Menggunakan Persamaan 2.9, daya yang diberikan oleh motor pada kecepatan yang berbeda dapat dinyatakan sebagai:
Output daya maksimum motor terjadi pada kecepatan di mana :
Dari persamaan tersebut didapatkan kecepatan
Selain konstanta listrik dan torsi, pabrikan sering menentukan resistansi jangkar R. Dengan menggunakan Persamaan 2.4 dan 2.10, arus stasioner dapat ditemukan dalam hal resistansi jangkar dan tegangan suplai:
2.7 Kontrol Motor DC Permanent Magnet
Bentuk paling sederhana dari kontrol motor adalah kontrol loop terbuka, di mana seseorang hanya mengatur nilai tegangan penggerak, dan karakteristik motor dan beban menentukan kecepatan operasi dan torsi. Tetapi masalah yang paling menarik memerlukan semacam kontrol otomatis, di mana tegangan secara otomatis divariasikan untuk menghasilkan gerakan yang diinginkan. Ini disebut loop tertutup atau kontrol umpan balik, dan memerlukan kecepatan keluaran dan/atau sensor torsi untuk memberi umpan balik nilai keluaran untuk terus membandingkan keluaran aktual dengan nilai yang diinginkan, yang disebut titik setel. Kontroler kemudian secara aktif mengubah output motor untuk bergerak lebih dekat ke set point. Pengontrol kecepatan elektronik terdiri dari dua jenis: amplifier linier dan modulator lebar pulsa. Pengontrol modulasi lebar pulsa memiliki keuntungan bahwa mereka menggerakkan transistor daya bipolar dengan cepat antara cutoff dan saturasi atau mereka menghidupkan dan mematikan FET. Dalam kedua kasus, disipasi daya kecil. Amplifier servo yang menggunakan amplifikasi daya linier cukup memuaskan tetapi menghasilkan banyak panas, karena berfungsi di daerah linier transistor. Anda akan menemukan pengontrol servo komersial menggunakan amplifier linier, tetapi karena kebutuhan daya yang lebih rendah, kemudahan desain, ukuran yang lebih kecil, dan biaya yang lebih rendah, kami fokus pada desain amplifier yang diaktifkan, yang umumnya disebut amplifier modulasi lebar-pulsa (PWM).
Prinsip penguat PWM ditunjukkan pada Gambar 10.18. Tegangan catu daya DC dengan cepat dialihkan pada frekuensi tetap f antara dua nilai (misalnya, ON dan OFF). Frekuensi ini sering melebihi 1 kHz. Nilai tinggi dipertahankan selama lebar pulsa variabel t dalam periode tetap T dimana
Bentuk gelombang asimetris yang dihasilkan memiliki siklus kerja yang didefinisikan sebagai rasio antara waktu ON dan periode bentuk gelombang, biasanya ditentukan sebagai persentase:
Saat siklus kerja diubah (oleh pengontrol), arus rata-rata melalui motor berubah, menyebabkan perubahan kecepatan dan torsi pada output. Skematik rangkaian pengontrol kecepatan motor dapat digambarkan sebagai berikut :

Ini terutama siklus kerja, dan bukan nilai tegangan catu daya, yang digunakan untuk mengontrol kecepatan motor. Diagram blok sistem kontrol umpan balik kecepatan PWM untuk motor DC ditunjukkan pada Gambar dibawah.

Sebuah tachometer tegangan menghasilkan output linier terkait dengan kecepatan motor. Ini dibandingkan dengan titik setel kecepatan yang diinginkan (tegangan lain yang dapat diatur secara manual atau dikendalikan komputer). Kesalahan dan arus motor dirasakan oleh regulator modulasi lebar pulsa yang menghasilkan gelombang persegi termodulasi lebar sebagai output. Sinyal ini diperkuat ke tingkat yang sesuai untuk menggerakkan motor.
Dalam pengontrol motor PWM, tegangan jangkar berubah dengan cepat, dan arus yang melalui motor dipengaruhi oleh induktansi dan resistansi motor. Karena kecepatan switching tinggi, arus yang dihasilkan melalui motor memiliki fluktuasi kecil di sekitar nilai rata-rata, seperti yang diilustrasikan pada Gambar di bawah. Saat siklus kerja tumbuh lebih besar, arus rata-rata tumbuh lebih besar dan kecepatan motor meningkat

3.1 Pendahuluan
Pada era industri modern saat ini, kebutuhan terhadap alat produksi yangtepat guna sangat diperlukan dapat meningkatkan efisiensi waktu dan biaya.Sebagian besar alat industri dan rumah tangga menggunakan tenaga listrik sebagaienergi penggerak utamanya. Penggunaan motor AC (Alternating Current) atau arus bolak-balik saat ini banyak digunakan diberbagai aplikasi. Salah satu penggunaan motor AC yang sering ditemui yaitu terdapat diperabotan rumah tangga berupa mesin cuci dan peralatan- peralatan yang serig dijumpai dalam rumah seperti kipas angin, AC, dan yang lainnya.
AC motor induksi adalah motor yang paling umum yang digunakan dalam sistem kontrol gerak industri, serta home appliances powered utama. Keuntungan utama AC induksi motor adalah sederhana dan kasar desain, murah, pemeliharaan rendah dan sambungan langsung kesumber listrik AC. Berbagai jenis motor induksi AC yang tersedia di pasar motor yang berbeda cocok untuk berbeda aplikasi. Meskipun motor induksi AC lebih mudah untuk desain dari motor DC, kecepatan dan torque kontrol dalam berbagai jenis motor induksi ACmemerlukan pemahamanyang lebih besar dari desain dan karakteristik motor tersebut.
3.2 Pengertian Motor AC
Motor AC adalah sebuah motor listrik yang digerakkan oleh Alternating Current atau arus bolak balik (AC). Umumnya, motor AC terdiri dari dua komponen utama yaitu stator dan rotor. Seperti yang telah dijelaskan sebelumnya pada motor DC, stator adalah bagian yangdiam dan letaknya berada di luar. Stator mempunyai coil yang di aliri oleh arus listrik bolak balik dan nantinya akan menghasilkan medan magnet yang berputar. Bagian yang kedua yaitu rotor. Rotor adalah bagian yang berputar dan letaknya berada di dalam (di sebelah dalam stator). Rotor bisa bergerak karena adanya torsi yang bekerja pada poros dimana torsi tersebut dihasilkan oleh medan magnet yang berputar.
3.3 Prinsip Kerja Motor Listrik AC
Adapun cara kerja motor sinkron yaitu bila kumparan stator atau armatur mendapatkan tegangan sumber bolak-balik (AC) 3 phasa, maka pada kumparan stator timbul fluks magnet putar. Fluks magnet putar ini setiap saat akan memotong kumparan stator, sehingga pada ujung-ujung kumparan stator timbul GGL armatur (Eam). Fluks putar yang dihasilkan oleh arus bolak-balik tidak seluruhnya tercakup oleh kumparan stator. Dengan perkataan lain, pada kumparan stator timbul fluks bocor dan dinyatakan dengan hambatan armatur (Ram) dan reaktansi armatur (Xam). Kumparan rotor terletak antara kutub-kutub magnit KU dan KS yang juga mempunyai fluks magnet. Kedua fluks magnet tersebut akan saling berinteraksi dan mengakibatkan rotor berputar dengan kecepatan putar rotor sinkron dengan kecepatan putar stator.
Pada motor DC, GGL armatur besarnya tergantung pada kecepatan putar rotor, sedangkan pada motor AC, GGL armatur besarnya tergantung pada faktor daya (PF) beban yang berupa kumparan stator.Untuk memperbesar kopel putar rotor (kecepatan putar rotor), kutub-kutub magnet yang terletak pada bagian rotor dililiti kumparan dan kumparan tersebut dialiri arus listrik DC dan arus ini disebut penguat (Lf). Dari kumparan rotor yang ikut berputar dengan kumparan stator (kecepatan sinkron) akan timbul fluks putar rotor yang bersifat reaktif terhadap fluks putar stator. Ini disebut reaktans pemagnet (XM). Reaktans pemagnet bersama- sama dengan reaktans armatur (Xam) disebut reaktans motor sinkron (Xsm). Dengan demikian rangkaian listrik dari motor sinkron adalah seperti tertera pada gambar 15 berikut :
Proses terjadinya perputaran rotor karena kumparan stator mendapat sumber arus AC 3 phasa, maka pada kumparan stator timbul fluks putar yang mempunyai kutub utara stator (Ns) dan kutub selatan (Ss). Andaikan saat awal fluks berputar searah jarum jam dengan kedudukan kutub utara stator pada titik A dan kutub selatan stator pada titik B, sedangkan kedudukan kutub- kutub magnet rotor yaitu kutub utara magnet pada titik A dan kutub selatan magnet pada titik B (perhatikan gambar a), maka kedua kutub magnet tersebut akan tolak-menolak. Kedudukan kutub-kutub fluks putar pada setengah periode berikutnya (gambar b), kutub selatan fluks putar stator pada titik A sedangkan kutub utara fliks putar pada titik B. Hal ini berlawanan dengan kedudukan kutub-kutub magnet rotor, yaitu kutub utara rotor pada titik A sedangkan kutub selatan rotor pada titik B. Hal ini membuat magnet rotor akan tertarik oleh arah fluks putar stator karena saling berlawanan tanda.
Pada setengah periode berikutnya (ganbar c), kutub utara stator pada titik A sedangkan kutub selatan stator pada titik B, demikian juga kutub utara rotor pada titik A dan kutub selatan rotor pada titik B. Sehingga pada periode berikutnya, rotor akan berputar sinkron dengan arah perputaran fluks stator.
3.4 Jenis Motor AC
Berdasarkan karakteristik dari arus listrik yang mengalir, motor AC (Alternating Current, Arus Bolak-balik) terdiri dari 2 jenis, yaitu:
a. Motor Listrik Sinkron
Motor sinkron adalah motor AC yang bekerja pada kecepatan tetap pada sistim frekuensi tertentu. Motor ini memerlukan arus searah (DC) untuk pembangkitan daya dan memiliki torque awal yang rendah, dan oleh karena itu motor sinkron cocok untuk penggunaan awal dengan beban rendah, seperti kompresor udara, perubahan frekwensi dan generator motor. Motor sinkron mampu untuk memperbaiki faktor daya sistim, sehingga sering digunakan pada sistim yang menggunakan banyak listrik.
Komponen utama motor sinkron adalah:
1) Rotor
Perbedaan utama antara motor sinkron dengan motor induksi adalah bahwa rotor mesin sinkron berjalan pada kecepatan yang sama dengan perputaran medan magnet. Hal ini memungkinkan sebab medan magnit rotor tidak lagi terinduksi. Rotor memiliki magnet permanen atau arus DC-excited, yang dipaksa untuk mengunci pada posisi tertentu bila dihadapkan dengan medan magnet lainnya.
2) Stator
Stator menghasilkan medan magnet berputar yang sebanding dengan frekwensi yang dipasok.
Prinsip Kerja Motor AC Sinkron
Motor sinkron serupa dengan motor induksi pada mana keduanya mempunyai belitan stator yang menghasilkan medan putar. Tidak seperti motor induksi, motor sinkron dieksitasi oleh sebuah sumber tegangan dc di luar mesin dan karenanya membutuhkan slip ring dan sikat (brush) untuk memberikan arus kepada rotor. Pada motor sinkron, rotor terkunci dengan medan putar dan berputar dengan kecepatan sinkron. Jika motor sinkron dibebani ke titik dimana rotor ditarik keluar dari keserempakannya dengan medan putar, maka tidak ada torque yang dihasilkan, dan motor akan berhenti.
Motor sinkron bukanlah self-starting motor karena torque hanya akan muncul ketika motor bekerja pada kecepatan sinkron; karenanya motor memerlukan peralatan untuk membawanya kepada kecepatan sinkron. Motor sinkron menggunakan rotor belitan. Jenis ini mempunyai kumparan ditempatkan pada slot rotor. Slipring dan sikat digunakan mensuplai arus kepada rotor.
Prinsip Motor Sinkron secara umum :
- Belitan medan terdapat pada rotor
- Belitan jangkar pada stator
- Pada motor sinkron, suplai listrik bolak-balik (AC ) membangkitkan fluksi medan putar stator (Bs) dan suplai listrik searah (DC) membangkitkan medan rotor (Bs). Rotor berputar karena terjadi interaksi tarik-menarik antara medan putar stator dan medan rotor. Namun dikarenakan tidak adanya torka-start pada rotor, maka motor sinkron membutuhkan prime-mover yang memutar rotor hingga kecepatan sinkron agar terjadi coupling antara medan putar stator (Bs) dan medan rotor (Br).
Penyalaan Motor Sinkron
Sebuah motor sinkron dapat dinyalakan oleh sebuah motor DC pada satu sumbu. Ketika motor mencapai kecepatan sinkron, arus AC diberikan kepada belitan stator. Motor dc saat ini berfungsi sebagai generator DC dan memberikan eksitasi medan DC kepada rotor. Beban sekarang boleh diberikan kepada motor sinkron. Motor sinkron seringkali dinyalakan dengan menggunakan belitan sangkar tupai (squirrel-cage) yang dipasang di hadapan kutub rotor. Motor kemudian dinyalakan seperti halnya motor induksi hingga mencapai –95% kecepatan sinkron, saat mana arus searah diberikan, dan motor mencapai sinkronisasi. Torque yang diperlukan untuk menarik motor hingga mencapai sinkronisasi disebut pull-in torque.
Seperti diketahui, rotor motor sinkron terkunci dengan medan putar dan harus terus beroperasi pada kecepatan sinkron untuk semua keadaan beban. Selama kondisi tanpa beban (no- load), garis tengah kutub medan putar dan kutub medan dc berada dalam satu garis (gambar dibawah bagian a). Seiring dengan pembebanan, ada pergeseran kutub rotor ke belakang, relative terhadap kutub stator (gambar bagian b). Tidak ada perubahan kecepatan. Sudut antara kutub rotor dan stator disebut sudut torque a.

Jika beban mekanis pada motor dinaikkan ke titik dimana rotor ditarik keluar dari sinkronisasi e = 90°, maka motor akan berhenti. Harga maksimum torque sehingga motor tetap bekerja tanpa kehilangan sinkronisasi disebut pull-out torque.
b. Motor Listrik Induksi
Pengenalan Motor Induksi
Motor induksi merupakan motor listrik arus bolak balik (AC) yang paling luasdigunakan Penamaannya berasal dari kenyataan bahwa motor ini bekerja berdasarkaninduksi medan magnet stator ke statornya, dimana arus rotor motor ini bukandiperoleh dari sumber tertentu, tetapi merupakan arus yang terinduksi sebagai akibat adanya perbedaan relatif antara putaran rotor dengan medan putar (rotating magneticfield) yang dihasilkan oleh arus stator.Motor induksi sangat banyak digunakan di dalam kehidupan sehari-hari baik diindustri maupun di rumah tangga. Motor induksi yang umum dipakai adalah motorinduksi 3-fase dan motor induksi 1-fase. Motor induksi 3- fase dioperasikan padasistem tenaga 3-fase dan banyak digunakan di dalam berbagai bidang industri dengan kapasitas yang besar. Motor induksi 1-fasa dioperasikan pada sistem tenaga1-fasa dan banyak digunakan terutama untuk peralatan rumah tangga seperti kipasangin, lemari es, pompa air, mesin cuci dan sebagainya karena motor induksi 1-fase mempunyai daya keluaran yang rendah. Bentuk gambaran motor induksi 3-fasa diperlihatkan pada gambar 15, dan contoh penerapan motor induksi ini di industry diperlihatkan pada gambar 18.

Konstruksi Motor Induksi
Motor induksi pada dasarnya mempunyai 3 bagian penting seperti yang diperlihatkan pada gambar 19 sebagai berikut.
1. Stator : Merupakan bagian yang diam dan mempunyai kumparan yang dapat menginduksikan medan elektromagnetik kepada kumparan rotornya.
2. Celah : Merupakan celah udara: Tempat berpindahnya energi dari startor kerotor.
3. Rotor : Merupakan bagian yang bergerak akibat adanya induksi magnet darikumparan stator yang diinduksikan kepada kumparan rotor.

Bentuk konstruksi rotor sangkar motor induksi secara lebih rinci diperlihatkan pada gambar 20.

Konstruksi stator motor induksi pada dasarnya terdiri dari bagian-bagian sebagai berikut:
1. Rumah stator (rangka stator) dari besi tuang.
2. Inti stator dari besi lunak atau baja silikon.
3. Alur, bahannya sama dengan inti, dimana alur ini merupakan tempat meletakkan belitan (kumparan stator).
4. Belitan (kumparan) stator dari tembaga.
Rangka stator motor induksi ini didisain dengan baik dengan empat tujuan yaitu:
1. Menutupi inti dan kumparannya.
2. Melindungi bagian-bagian mesin yang bergerak dari kontak langsung dengan manusia dan dari goresan yang disebabkan oleh gangguan objek atau gangguan udara terbuka (cuaca luar).
3. Menyalurkan torsi ke bagian peralatan pendukung mesin dan oleh karena itu stator didisain untuk tahan terhadap gaya putar dan goncangan.
4. Berguna sebagai sarana rumahan ventilasi udara sehingga pendinginan lebihefektif.
Berdasarkan bentuk konstruksi rotornya, maka motor induksi dapat dibagimenjadi dua jenis seperti yang diperlihatkan pada gambar 3.3, yaitu.
1. Motor induksi dengan rotor sangkar (squirrel cage).
2. Motor induksi dengan rotor belitan (wound rotor)
Konstruksi rotor motor induksi terdiri dari bagian-bagian sebagai berikut:
1. Inti rotor, bahannya dari besi lunak atau baja silikon sama dengan inti stator.
2. Alur, bahannya dari besi lunak atau baja silikon sama dengan inti. Alur merupakan tempat meletakkan belitan (kumparan) rotor.
3. Belitan rotor, bahannya dari tembaga.
4. Poros atau as.
Diantara stator dan rotor terdapat celah udara yang merupakan ruangan antara stator dan rotor. Pada celah udara ini lewat fluks induksi stator yang memotongkumparan rotor sehingga meyebabkan rotor berputar. Celah udara yang terdapatantara stator dan rotor diatur sedemikian rupa sehingga didapatkan hasil kerja motor yang optimum. Bila celah udara antara stator dan rotor terlalu besar akan mengakibatkan efisiensi motor induksi rendah, sebaliknya bila jarak antara celah terlalu kecil/sempit akan menimbulkan kesukaran mekanis pada mesin. Bentuk gambaran sederhana bentuk alur / slot pada motor induksi diperlihatkan pada gambar 20 dan gambaran sederhana penempatan stator dan rotor pada motor induksi diperlihatkan pada gambar 19.
Prinsip Kerja Motor Induksi
Motor induksi bekerja berdasarkan induksi elektromagnetik dari kumparan stator kepada kumparan rotornya. Bila kumparan stator motor induksi 3-fasa yang dihubungkan dengan suatu sumber tegangan 3-fasa, maka kumparan stator akan menghasilkan medan magnet yang berputar. Garis-garis gaya fluks yang diinduksikan dari kumparan stator akan memotong kumparan rotornya sehinggat imbul emf (ggl) atau tegangan induksi. Karena penghantar (kumparan) rotor merupakan rangkaian yang tertutup, maka akan mengalir arus pada kumparan rotor. Penghantar (kumparan) rotor yang dialiri arus ini berada dalam garis gaya fluks yangberasal dari kumparan stator sehingga kumparan rotor akan mengalami gaya Lorentz yang menimbulkan torsi yang cenderung menggerakkan rotor sesuai dengan arah pergerakan medan induksi stator. Medan putar pada stator tersebut akan memotong konduktor-konduktor padarotor, sehingga terinduksi arus; dan sesuai dengan Hukum Lentz, rotor pun akan turut berputar mengikuti medan putar stator. Perbedaan putaran relatif antara stator danrotor disebut slip. Bertambahnya beban, akan memperbesar kopel motor yang oleh karenanya akan memperbesar pula arus induksi pada rotor, sehingga slip antaramedan putar stator dan putaran rotor pun akan bertambah besar. Jadi, bila beban motor bertambah, putaran rotor cenderung menurun. Pada rangka stator terdapat kumparan stator yang ditempatkan pada slot yang dililitkan pada sejumlah kutup tertentu. Jumlah kutub (pole) ini menentukan kecepatan berputarnya medan stator yang terjadi yang diinduksikan ke rotornya.
Makin besar jumlah pole akan mengakibatkan makin kecilnya kecepatan putar medan stator dan sebaliknya. Kecepatan berputarnya medan putar ini disebut kecepatan sinkron. Besarnya kecepatan sinkron ini adalah sebagai berikut:
dimana,
Ns = kecepatan putar sinkron (rpm)
P = jumlah pole
f = frekuensi sumber AC (Hz)
Namun, agar arus ini dapat diinduksi, kecepatan rotor fisik dan kecepatan medan magnet yang berputar di stator harus berbeda, atau medan magnet tidak akan bergerak relatif terhadap konduktor rotor dan tidak ada arus yang akan diinduksi. Jika kebetulan ini terjadi, rotor biasanya sedikit melambat sampai arus diinduksi kembali dan kemudian rotor berlanjut seperti sebelumnya. Perbedaan antara kecepatan rotor dan kecepatan medan magnet yang berputar di stator disebut slip. Ini tidak memiliki unit dan merupakan rasio antara kecepatan relatif medan magnet seperti yang terlihat oleh rotor (kecepatan slip) dengan kecepatan medan stator yang berputar. Karena itu motor induksi kadang-kadang disebut sebagai mesin asinkron.
Jika medan magnet pada stator berputar dengan kecepatan sinkron ns, Dan Rotor berputar dengan kecepatan n, maka slip (S ) dihitung sebagai,
Biasanya slip bisa dinyatakan dalam %. Pada saat diam (rotor tidak berputar) maka slip, s = 1 atau 100%.
Sehingga kecepatan motor Induksi,

3.5 Kurva Karakteristik Motor AC Induksi
Kurva karakteristik Torsi vs Kecepatan dan Arus vs Kecepatan dapat dilihat pada gambar di bawah. Pada kurva dapat dilihat bahwa arus yang diperlukan untuk menyalakan motor sangat besar di awal, arus ini disebut juga in-rush current yang nilainya dapat mencapai 6 kali arus motor pada kondisi operasi. Setelah kecepatan motor meningkat, arus yang diperlukan untuk menggerakkan motor akan semakin berkurang.

Pada saat motor Induksi telah berjalan, kecepatan motor ditentukan oleh beban yang ditanggung motor. Pada grafik, beban yang ditanggung oleh motor digambarkan dengan garis datar putus-putus (Constant Torque Load). Perpotongan antara kurva torsi motor dan torsi beban menentukan titik operasi motor, kecepatan motor dapat dicari dengan menarik titik potong ini ke bawah hingga didapat kecepatan operasi. Slip motor Induksi merupakan selisih persentase kecepatan motor operasi dan kecepatan sinkron.
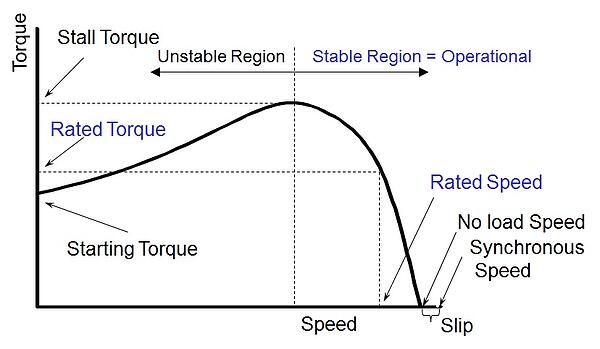
Beban torsi yang dapat ditangani oleh motor Induksi untuk operasi normal sebaiknya tidak diatas rated torque. Ketika beban torsi terus dinaikkan hingga mencapai nilai Stall Torque atau Breakdown Torque maka motor Induksi akan berhenti berputar. Oleh karena itu, penting untuk melihat karakteristik torsi motor Induksi dan mengetahui beban ketika memilih motor Induksi untuk suatu aplikasi.
Untuk menambah pemahaman anda mengenai motor sinkron dan motor Induksi silahkan tonton video berikut :
Intro Motor Induksi :
Intro Motor Sinkron :
Motor SyncRM :
Motor Induksi lengkap :
Last modified: Monday, 13 March 2023, 12:03 AM
