 STECHOQ TRAINING CENTER
STECHOQ TRAINING CENTER
Day 3 - Motor Stepper & BLDC
MOTOR STEPPER
Motor stepper adalah perangkat elektromekanis yang bekerja dengan mengubah pulsa elektronis menjadi gerakan mekanis diskrit. Motor stepper bergerak berdasarkan urutan pulsa yang diberikan kepada motor. Karena itu, untuk menggerakkan motor stepper diperlukan pengendali motor stepper yang membangkitkan pulsa-pulsa periodik.


Motor stepper adalah motor DC yang khusus berputar dalam suatu derajat yang tetap yang disebut step (langkah). Satu step antara 0,9 sampai 90°. Motor stepper terdiri dari rotor dan stator. Rotor adalah permanen maget sedangkan stator adalah elektromagnet. Rotor akan bergerak jika stator diberi aliran listrik. Aliran listrik ini membangkitkan medan magnet dan membuat rotor menyesuaikan dengan kutub magnet yang dimilikinya. Motor stepper digunakan khusus menentukan posisi batang motor tanpat harus mempergunakan sensor posisi. Hal ini dapat dilakukan dengan cara menghitung jumlah step yang harus diberikan dari posisi acuan. Ukuran dari step ditentukan oleh jumlah rotor dan kutub stator.Tidak ada kesalahan kumulatif yaitu kesalahan sudut tidak terus bertambahan dengan meningkatnya step

Dari gambar diatas terdapat istiah sbb: – stator stator core merupakan struktur bagian terluar dan memiliki enam poles/teeth. – rotor merupakan bagian dalam (inner device) yang terdiri dari empat poles. Baik stator maupun rotor dibuat dari soft steel. Pada gambar nampak bahwa stator memiliki tiga set windings (dict: “an electrical conductor that is wound around a magnetic material, esp. one encircling part of the stator or rotor of an electric motor or generator or forming part of a transformer”). Satu set dari windings dikatakan sebagai satu phase, dengan demikian gambar diatas merupakan motor tiga fase. Arus disuplai darisumber tegangan DC melalui switch I, II, dan III. Penggunaan motor stepper memiliki beberapa keunggulan dibandingkan dengan penggunaan motor DC biasa. Keunggulannya antara lain adalah :
• Sudut rotasi motor proporsional dengan pulsa masukan sehingga lebih mudah diatur.
• Motor dapat langsung memberikan torsi penuh pada saat mulai bergerak.
• Posisi dan pergerakan repetisinya dapat ditentukan secara presisi.
• Memiliki respon yang sangat baik terhadap start, stop dan berbalik (perputaran).
• Sangat realibel karena tidak adanya sikat yang bersentuhan dengan rotor seperti pada motor DC.
• Dapat menghasilkan perputaran yang lambat sehingga beban dapat dikopel langsung ke porosnya.
• Frekuensi perputaran dapat ditentukan secara bebas dan mudah pada range yang luas.
Pada motor stepper umumnya tertulis spesifikasi Np (pulsa / rotasi). Sedangkan kecepatan pulsadiekspresikan sebagai pps (pulsa per second) dan kecepatan putar umumnya ditulis sebagai
ω (rotasi / menit atau rpm). Kecepatan putar motor stepper (rpm) dapat diekspersikan menggunakan kecepatan pulsa (pps) sebagai berikut :
Torsi yang dapat dihasilkan oleh motor stepper dapat dihitung berdasarkan perbandingan daya kerja motor terhadap kecepatan putarannya atau dapat dirumuskan sebagai berikut :

Motor stepper banyak digunakandalam bidang industri terutama dipakai pada suatu mesin atau peralatan kontrol digital yang membutuhkan ketepatan posisi. Keunggulan motor stepperlainnya adalah frekuensi pulsa input-nya tidak tergantung pada beban. Perputaran motor stepper adalah perputaran yang diskrit dan arah perputarannya dapat searah ataupun berlawanan dengan arah jarum jam. Stuktur sederhana dari motor stepper tampak pada Gambar di bawah dalam penampang melintang :

Jika dilihat dari prinsipnya motor stepper terbagi menjadi tiga jenis motor, dimana 3 jenis motor stepper memiliki karakteristik yang berbeda-beda. Sedangkan jika dilihat dari lilitan yang ada didalamnya motor stepper dapat dibagi menjadi 2 jenis.
Berdasarkan prisnsip kerjanya ketiga jenis motor stepper tersebut adalah :
Permanent Magnet (PM)
Motor stepper berjenis PM adalah motor stepper yang rotornya merupakan magnet yang permanen, stator memperoleh medan magnet dari lilitan yang melingkari stator tersebut sehingga stator menghasilkan kutub – kutub magnet. Dengan adanya interaksi antara fluksrotordengan gaya magnet stator maka motor stepper ini akan bergerak atau beroperasi. Terjadinya fluks dikarenakan pembiasan dari magnet rotor. Ciri – ciri dari motor stepperbejenis PM adalah pada saat keadaan tidak ada aliran arus (biasa disebut keadaan tanpa eksitasi) maka jika motor ini diputar terdapat torsi yang menahan atau melawan.

Gambar tersebut merupakan magnet permanent sederhana 90 derajat motor magnet permanent dengan empat phase (A-D).
Variable Reluctance(VR)
Motor stepper jenis ini memiliki bentuk rotor yang unik yaitu berbentuk silinder dan pada semua unitnya memiliki gerigi yang memiliki hubungan dengan kutub-kutub stator. Rotor pada magnet tipe ini tidak menggunakan magnet permanent. Stator terlilit oleh lilitan sehingga pada saat teraliri arus, stator akan menghasilkan kutub magnet. Jumlah gerigi pada rotor akan menentukan langkah atau step motor. Perbedaan motor stepper berjenis PM dengan VR yaitu motor berjenis VR memiliki torsi yang relatif lebih kecil dibanding dengan motor stepper berjenis PM. Hal lain yang dapat dilihat adalah sisa kemagnetan sangat kecil sehingga pada saat motor stepper tidak dialiri arus maka ketika diputar tidak ada torsi yang melawan. Sudut langkah motor stepper berjenis VR ini bervariasi yaitu sekitar sampai dengan 30o. Motor stepper berjenis VR ini memiliki torsi yang kecil. Sering ditemukan pada printer dan instrumen-instrumen pabrik yang ringan yang tidak membutuhkan torsi yang besar.
Pada gambar diatas motor mempunyai 3 pasang kutub stator (A, B, C) yang diset terpisah 15 derajat. Arus dialirkan ke kutub A melalui lilitan motor yang menyebabkan tarikan magnetic yang menyejajarkan gigi rotor kekutub A. jika kita memberi energi kekutub B maka akan menyebabkan rotor berputar 15 derajat sejajar kutub B. proses ini akan berlanjut kekutub C dan kembali kekutub A searah dengan jarum jam.
Permanent Magnet – Hybrid (PM-H)
Permanent magnet hybrid merupakan penyempurnaan motor stepper di mana motor stepper ini memiliki kecepatan 1000step/detik namun juga memiliki torsi yang cukup besar sehingga dapat dikatakan bahwa PM-H merupakan motor stepper kombinasi antara PM dan VR motor stepper. Motor hybrid mengkombinasikan karakteristik terbaik dari motor variable reluktansi dan motor magnet permanent. Motor ini dibangun dengan kutub stator yang banyak-gigi dan rotor magnet permanent. Motor hybrid standar mempunyai 200 gigi rotor dan berputar pada 1,8 derajat sudut step. Karena memperlihatkan torsi tinggi dan dinamis serta berputar dengan kecepatan yang tinggi maka motor ini digunkan pada aplikasi yang sangat luas

Motor Stepper Unipolar
Motor stepper unipolar terdiri dari dua lilitan yang memiliki center tap. Center tap dari masing masing lilitan ada yang berupa kabel terpisah ada juga yang sudah terhubung didalamnya sehingga center tap yang keluar hanya satu kabel. Untuk motor stepper yang center tapnya ada pada masing – masing lilitan kabel inputnya ada 6 kabel. Namun jika center tapnya sudah terhubung di dalam kabel inputannya hanya 5 kabel. Center tap dari motor stepper dapat dihubungkan ke pentanahan atau ada juga yang menghubungkannya ke +VCC hal ini sangat dipengaruhi oleh driver yang digunakan. Sebagai gambaran dapat dilihat konstruksi motor stepper unipolar pada gambar 7

Motor Stepper Bipolar
Motor stepper bipolar memiliki dua lilitan perbedaaan dari tipe unipolar adalah bahwa pada tipe bipolar lilitannya tidak memiliki center tap. Keunggulan tipe bipolar yaitu memiliki torsi yang lebih besar jika dibandingkan dengan tipe unipolar untuk ukuran yang sama. Pada motor stepper tipe ini hanya memiliki empat kabel masukan. Namun untuk menggerakan motor stepper tipe ini lebih rumit jika dibandingkan dengan menggerakan motor stepper tipe unipolar.

Dari gambar diatas dapat dilihat bagian-bagian dari motor stepper yaitu tersusun atas rotor, stator, bearing, casing dan sumbu. sumbu merupakan pegangan dari rotor dimana sumbu merupakan bagian tengah dari rotor, sehingga ketika rotor berputar sumbu ikut berputar. Stator memiliki dua bagian yaitu pelat inti dan lilitan. Plat inti dari motor stepper ini biasanya menyatu dengan casing. Casing motor stepper terbuat dari aluminium dan ini berfungsi sebagai dudukan bearing dan stator pemegangnya adalah baud sebanyak empat buah. Di dalam motor stapper memiliki dua buah bearing yaitu bearing bagian atas dan bearing bagian bawah.


DRIVER
Untuk menggerakan motor stepper berbeda dengan menggerakan motor dc, dimana untuk menggerakan motor stepper diperlukan rangkaian driver yang fungsinya untuk memberikan catu ke motor stepper. Driver tidak hanya mengeluarkan tegangan, namun tegangan yang dikeluarkan juga harus dalam bentuk pulsa. Karena motor stepper bergerak step by step sesuai dengan pulsa. Bentuk pulsa yang dikeluarkan oleh driver dapat dilihat pada dua gambar di bawah.
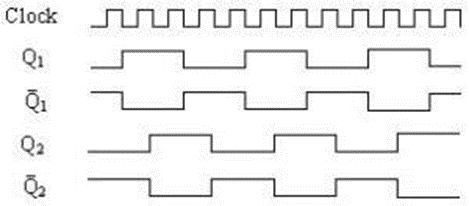
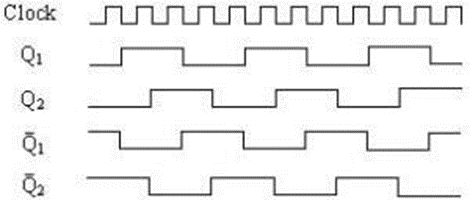
Bentuk pulsa seperti gambar di atas harus dapat dikeluarkan oleh driver sebagai syarat untuk dapat menggerakan motor stepper. tinggi pulsa yang dikeluarkan juga harus sesuai dengan spesifikasi tegangan motor stepper yaitu kisaran 5 sampai 36 volt. Pada dua gambar sebenarnya memiliki bentuk yang sama hanya saja susunannya berbeda. pada gambar kiri adalah susunan pulsa untuk menggerakan motor stepper tipe bipolar, sedangkan pada gambar kanan adalah susunan pulsa untuk menggerakan motor stepper tipe unipolar.
Driver untuk motor stepper unipolar lebih sederhana dari driver tipe bipolar karena untuk motor stepper tipe unipolar driver cukup dengan dilalui arus satu arah saja sedangkan untuk tipe bipolar driver harus dapat dilalui oleh arus dengan dua arah. Dari alasan ini motor stepper tipe unipolar lebih banyak digunakan karena untuk menggerakannya lebih sederhana. Driver untuk motor stepper unipolar data menggunakan IC ULN2003, ULN2004 atau dapat juga dengan menggunakan transistor. Jika menggunakan transistor, maka transistor difungsikan sebagai saklar untuk menghubungkan motor stepper ke Vcc atau ke ground tergantung dari hubungan common motor stepper. Untuk menggerakan motor stepper tipe bipolar dapat menggunakan IC L293, L297+L298, PBL3717 atau menggunakan transistor yang dibuat rangkaian push pull.
Driver dapat menggunakan empat masukan langsung atau hanya dengan dua masukan saja. Jika menggunakan empat masukan secara langsung maka driver berfungsi untuk menguatkan sinyal tersebut. Namun jika menggunakan dua masukan saja maka masih diperlukan Translator (penerjemah) yang fungsinya
5.1 Motor Brushless Direct Current
Motor Brushless Direct Current (BLDC) adalah salah satu jenis motor yang cepat populer. Motor BLDC digunakan dalam industri seperti Peralatan, Otomotif, Dirgantara, Konsumen, Medis, Peralatan Otomasi Industri dan Instrumentasi.
Sesuai dengan namanya, motor BLDC tidak menggunakan sikat untuk pergantian; sebaliknya, mereka diubah secara elektronik. Motor BLDC memiliki banyak keunggulan dibandingkan motor DC brushed dan motor induksi. Beberapa di antaranya adalah:
• Karakteristik kecepatan versus torsi yang lebih baik
• Respon dinamis tinggi
• Efisiensi tinggi
• Masa pakai yang lama
• Pengoperasian tanpa suara
• Rentang kecepatan yang lebih tinggi
Selain itu, rasio torsi yang dikirim ke ukuran motor lebih tinggi, sehingga berguna dalam aplikasi di mana ruang dan berat merupakan faktor kritis.
5.2 Prinsip Operasi dan Konstruksi BLDC
Motor BLDC adalah salah satu jenis motor sinkron. Artinya medan magnet yang dihasilkan oleh stator dan medan magnet yang dihasilkan oleh rotor berputar pada frekuensi yang sama. Motor BLDC tidak mengalami “selip” yang biasanya terlihat pada motor induksi.
Motor BLDC hadir dalam konfigurasi fase tunggal, 2 fase, dan 3 fase. Sesuai dengan jenisnya, stator memiliki jumlah belitan yang sama. Dari jumlah tersebut, motor 3 fase adalah yang paling populer dan banyak digunakan. Catatan aplikasi ini berfokus pada motor 3 fase.
Stator
Stator motor BLDC terdiri dari laminasi baja bertumpuk dengan belitan yang ditempatkan di slot yang dipotong secara aksial di sepanjang pinggiran bagian dalam (seperti yang ditunjukkan pada Gambar 3). Secara tradisional, stator menyerupai motor induksi; namun, belitan didistribusikan dengan cara yang berbeda. Kebanyakan motor BLDC memiliki tiga belitan stator yang terhubung secara bintang. Masing-masing belitan ini dibangun dengan banyak kumparan yang saling berhubungan untuk membentuk belitan. Satu atau lebih kumparan ditempatkan di slot dan mereka saling berhubungan untuk membuat belitan. Masing-masing belitan ini didistribusikan di pinggiran stator untuk membentuk jumlah kutub yang genap.
Ada dua jenis varian belitan stator: motor trapesium dan motor sinusoidal. Diferensiasi ini dibuat atas dasar interkoneksi kumparan di gulungan stator untuk memberikan berbagai jenis gaya gerak balik (EMF). Lihat "Apa itu EMF Kembali?" bagian untuk informasi lebih lanjut.
Seperti namanya, motor trapesium memberikan EMF balik dalam bentuk trapesium dan EMF belakang motor sinusoidal adalah sinusoidal, seperti yang ditunjukkan pada Gambar 1 dan Gambar 2. Selain EMF belakang, arus fasa juga memiliki variasi trapesium dan sinusoidal dalam masing-masing jenis motor. Hal ini membuat output torsi oleh motor sinusoidal lebih halus daripada motor trapesium. Namun, ini datang dengan biaya tambahan, karena motor sinusoidal mengambil interkoneksi belitan ekstra karena distribusi koil pada pinggiran stator, sehingga meningkatkan asupan tembaga oleh belitan stator.


Tergantung pada kemampuan catu daya kontrol, motor dengan peringkat tegangan stator yang benar dapat dipilih. Empat puluh delapan volt, atau motor pengenal tegangan kurang digunakan dalam otomotif, robotika, gerakan lengan kecil, dan sebagainya. Motor dengan 100 volt, atau peringkat yang lebih tinggi, digunakan dalam peralatan, otomatisasi, dan aplikasi industri.

Rotor
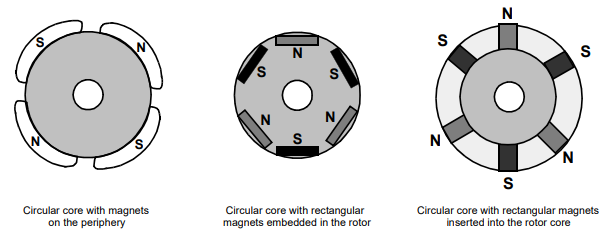
Rotor terbuat dari magnet permanen dan dapat bervariasi dari dua hingga delapan pasang kutub dengan kutub Utara (N) dan Selatan (S) yang bergantian.
Berdasarkan kerapatan medan magnet yang dibutuhkan dalam rotor, bahan magnet yang tepat dipilih untuk membuat rotor. Magnet ferit secara tradisional digunakan untuk membuat magnet permanen. Seiring kemajuan teknologi, magnet paduan tanah jarang semakin populer. Magnet ferit lebih murah tetapi memiliki kelemahan kerapatan fluks rendah untuk volume tertentu. Sebaliknya, bahan paduan memiliki kerapatan magnetik tinggi per volume dan memungkinkan rotor untuk mengompresi lebih jauh untuk torsi yang sama. Juga, magnet paduan ini meningkatkan rasio ukuran terhadap berat dan memberikan torsi yang lebih tinggi untuk motor dengan ukuran yang sama menggunakan magnet ferit.
Neodymium (Nd), Samarium Cobalt (SmCo) dan paduan Neodymium, Ferrite dan Boron (NdFeB) adalah beberapa contoh magnet paduan tanah jarang. Penelitian berkelanjutan sedang dilakukan untuk meningkatkan kerapatan fluks untuk menekan rotor lebih jauh.
Gambar 4 menunjukkan penampang dari pengaturan magnet yang berbeda dalam sebuah rotor.
Hall Sensor
Tidak seperti motor DC yang disikat, pergantian motor BLDC dikendalikan secara elektronik. Untuk memutar motor BLDC, belitan stator harus diberi energi secara berurutan. Penting untuk mengetahui posisi rotor untuk memahami belitan mana yang akan diberi energi mengikuti urutan pemberian energi. Posisi rotor dideteksi menggunakan sensor efek Hall yang disematkan ke stator.
Kebanyakan motor BLDC memiliki tiga sensor Hall yang tertanam ke dalam stator di ujung motor yang tidak mengemudi.
Setiap kali kutub magnet rotor lewat di dekat sensor Hall, mereka memberikan sinyal tinggi atau rendah, yang menunjukkan kutub N atau S lewat di dekat sensor. Berdasarkan kombinasi ketiga sinyal sensor Hall ini, urutan pergantian yang tepat dapat ditentukan

Gambar 5 menunjukkan penampang melintang motor BLDC dengan rotor yang memiliki magnet permanen N dan S bergantian. Sensor hall disematkan ke bagian stasioner motor. Menanamkan sensor Hall ke dalam stator adalah proses yang kompleks karena setiap ketidaksejajaran pada sensor Hall ini, sehubungan dengan magnet rotor, akan menghasilkan kesalahan dalam penentuan posisi rotor. Untuk menyederhanakan proses pemasangan sensor Hall ke stator, beberapa motor mungkin memiliki magnet sensor Hall pada rotor, selain magnet rotor utama. Ini adalah versi replika rotor yang diperkecil. Oleh karena itu, setiap kali rotor berputar, magnet sensor Hall memberikan efek yang sama seperti magnet utama. Sensor Hall biasanya dipasang pada papan PC dan dipasang pada penutup enklosur di ujung non-penggerak. Hal ini memungkinkan pengguna untuk menyesuaikan perakitan lengkap sensor Hall, untuk menyelaraskan dengan magnet rotor, untuk mencapai kinerja terbaik.
Berdasarkan posisi fisik sensor Hall, ada dua versi keluaran. Sensor Hall mungkin pada pergeseran fase 60 ° atau 120 ° satu sama lain. Berdasarkan hal ini, pabrikan motor menentukan urutan pergantian, yang harus diikuti saat mengontrol motor.
Teori Operasi
Setiap urutan komutasi memiliki salah satu belitan yang diberi energi menjadi daya positif (arus masuk ke belitan), belitan kedua negatif (arus keluar dari belitan) dan belitan ketiga dalam kondisi tidak diberi energi. Torsi dihasilkan karena interaksi antara medan magnet yang dihasilkan oleh kumparan stator dan magnet permanen. Idealnya, torsi puncak terjadi ketika kedua medan ini berada pada 90 ° satu sama lain dan jatuh saat medan bergerak bersama. Agar motor tetap berjalan, medan magnet yang dihasilkan oleh belitan harus bergeser posisinya, saat rotor bergerak untuk mengejar medan stator. Apa yang dikenal sebagai “Pergantian Enam Langkah” mendefinisikan urutan pemberian energi pada belitan. Lihat bagian "Urutan Pergantian" untuk informasi terperinci dan contoh tentang pergantian enam langkah
5.3 Karakteristik Torsi-Kecepatan
Gambar 6 menunjukkan contoh karakteristik torsi/kecepatan. Ada dua parameter torsi yang digunakan untuk menentukan motor BLDC, torsi puncak (TP) dan torsi terukur (TR). (Lihat Lampiran A: “Spesifikasi Teknis Motor Tipikal” untuk daftar parameter yang lengkap.) Selama operasi berkelanjutan, motor dapat dibebani hingga torsi terukur. Seperti dibahas sebelumnya, dalam motor BLDC, torsi tetap konstan untuk rentang kecepatan hingga kecepatan pengenal. Motor dapat dijalankan hingga kecepatan maksimum, yang dapat mencapai 150% dari kecepatan pengenal, tetapi torsi mulai menurun.
Aplikasi yang memiliki start dan stop yang sering dan pembalikan putaran yang sering dengan beban pada motor, menuntut lebih banyak torsi daripada torsi terukur. Persyaratan ini datang untuk waktu yang singkat, terutama ketika motor mulai dari posisi diam dan selama akselerasi. Selama periode ini, torsi ekstra diperlukan untuk mengatasi inersia beban dan rotor itu sendiri. Motor dapat menghasilkan torsi yang lebih tinggi, maksimum hingga torsi puncak, selama mengikuti kurva torsi kecepatan. Lihat bagian “Memilih Peringkat Motor yang Cocok untuk Aplikasi” untuk memahami cara memilih parameter ini untuk aplikasi.

5.4 Perbandingan Motor BLDC dengan Jenis Motor Lain
Dibandingkan dengan motor DC brushed dan motor induksi, motor BLDC memiliki banyak kelebihan dan sedikit kekurangan. Motor brushless membutuhkan perawatan yang lebih sedikit, sehingga memiliki masa pakai yang lebih lama dibandingkan dengan motor DC brushed. Motor BLDC menghasilkan lebih banyak daya keluaran per ukuran bingkai daripada motor DC sikat dan motor induksi. Karena rotor terbuat dari magnet permanen, maka inersia rotor lebih kecil dibandingkan dengan jenis motor lainnya. Ini meningkatkan karakteristik akselerasi dan deselerasi, memperpendek operasi siklus. Karakteristik kecepatan/torsi liniernya menghasilkan pengaturan kecepatan yang dapat diprediksi. Dengan motor tanpa sikat, pemeriksaan sikat dihilangkan, menjadikannya ideal untuk area akses terbatas dan aplikasi di mana servis sulit dilakukan. Motor BLDC beroperasi jauh lebih tenang daripada motor DC brushed, sehingga mengurangi Interferensi Elektromagnetik (EMI). Model tegangan rendah ideal untuk pengoperasian baterai, peralatan portabel, atau aplikasi medis.
Tabel 1 merangkum perbandingan antara motor BLDC dan motor DC yang disikat. Tabel 2 membandingkan motor BLDC dengan motor induksi
Fitur | Motor BLDC | Motor DC yang Disikat |
Penggantian | Pergantian elektronik berdasarkan sensor posisi Hall. | Pergantian yang disikat. |
Pemeliharaan | Kurang diperlukan karena tidak adanya kuas. | Perawatan berkala diperlukan. |
Kehidupan | Lebih lama. | Singkat. |
Karakteristik Kecepatan/Torsi | Flat – Memungkinkan pengoperasian pada semua kecepatan dengan beban terukur. | Cukup datar – Pada kecepatan yang lebih tinggi, gesekan sikat meningkat, sehingga mengurangi torsi yang berguna. |
Efisiensi | Tinggi – Tidak ada penurunan tegangan pada sikat. | Sedang. |
KeluaranDaya / Ukuran Bingkai | Tinggi – Ukuran yang lebih kecil karena karakteristik termal yang unggul. Karena BLDC memiliki belitan pada stator, yang terhubung ke kasing, panas disipasi lebih baik. | Sedang/Rendah – Panas yang dihasilkan oleh angker dihamburkan di celah udara, sehingga meningkatkan suhu di celah udara dan membatasi spesifikasi pada daya keluaran/ukuran bingkai. |
Inersia Rotor | Rendah, karena memiliki magnet permanen pada rotor. Ini meningkatkan respons dinamis. | Inersia rotor yang lebih tinggi yang membatasi karakteristik dinamis. |
Kisaran kecepatan | Lebih Tinggi – Tidak ada batasan mekanis yang dikenakan oleh sikat/komutator. | Bawah – Keterbatasan mekanis oleh kuas. |
Pembangkit Kebisingan Listrik | Rendah. | Busur di sikat akan menghasilkan kebisingan yang menyebabkan EMI di peralatan di dekatnya. |
Biaya Bangunan | Lebih Tinggi – Karena memiliki magnet permanen, biaya pembangunan lebih tinggi. | Rendah. |
Kontrol | Kompleks dan mahal. | Sederhana dan murah. |
Persyaratan Kontrol | Pengontrol selalu diperlukan untuk menjaga motor berlari. Kontroler yang sama dapat digunakan untuk kontrol kecepatan variabel. | Tidak diperlukan pengontrol untuk kecepatan tetap; pengontrol diperlukan hanya jika kecepatan variabel diinginkan. |
Fitur | Motor BLDC | Motor Induksi AC |
Karakteristik Kecepatan/Torsi | Flat – Memungkinkan pengoperasian pada semua kecepatan dengan beban terukur. | Nonlinier – Torsi yang lebih rendah pada kecepatan yang lebih rendah. |
KeluaranDaya / Ukuran Bingkai | Tinggi – Karena memiliki magnet permanen pada rotor,ukuran yang lebih kecil dapat dicapai untuk daya keluaran yang diberikan. | Sedang – Karena stator dan rotor memiliki belitan,daya keluaran untuk ukuran lebih rendah dari BLDC. |
Inersia Rotor | Rendah – Karakteristik dinamis yang lebih baik. | Tinggi – Karakteristik dinamis yang buruk. |
Mulai Saat Ini | Rated – Tidak diperlukan sirkuit starter khusus. | Kira-kira hingga tujuh kali nilai – Pemula peringkat sirkuit harus dipilih dengan cermat. Biasanya menggunakan starter Star-Delta. |
Persyaratan Kontrol | Pengontrol selalu diperlukan untuk menjaga motor berlari. Kontroler yang sama dapat digunakan untuk kontrol kecepatan variabel. | Tidak diperlukan pengontrol untuk kecepatan tetap; pengontrol diperlukan hanya jika kecepatan variabel diinginkan. |
Tergelincir | Tidak ada slip yang dialami antara frekuensi stator dan rotor. | Rotor berjalan pada frekuensi yang lebih rendah daripada stator dengan frekuensi slip dan slip meningkat dengan beban pada motor. |
5.5 Urutan Komutasi
Gambar 7 menunjukkan contoh sinyal sensor Hall terhadap EMF balik dan arus fasa. Gambar 8 menunjukkan urutan switching yang harus diikuti sehubungan dengan sensor Hall. Nomor urut pada Gambar 7 sesuai dengan nomor yang diberikan pada Gambar 8.
Setiap 60 derajat rotasi listrik, salah satu sensor Hall mengubah keadaan. Mengingat ini, dibutuhkan enam langkah untuk menyelesaikan siklus listrik. Secara sinkron, dengan setiap 60 derajat listrik, peralihan arus fasa harus diperbarui. Namun, satu siklus listrik mungkin tidak sesuai dengan revolusi mekanis lengkap dari rotor. Jumlah siklus listrik yang harus diulang untuk menyelesaikan rotasi mekanis ditentukan oleh pasangan kutub rotor. Untuk setiap pasangan kutub rotor, satu siklus listrik selesai. Jadi, jumlah siklus/putaran listrik sama dengan pasangan kutub rotor.
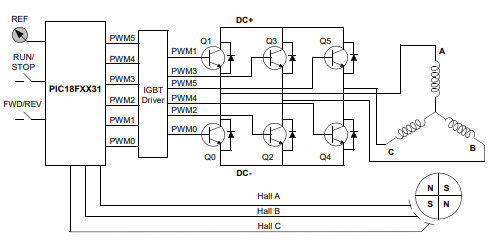
Gambar 9 menunjukkan diagram blok pengontrol yang digunakan untuk mengendalikan motor BLDC. Q0 hingga Q5 adalah sakelar daya yang dikendalikan oleh mikrokontroler PIC18FXX31. Berdasarkan tegangan motor dan peringkat arus, sakelar ini dapat berupa MOSFET, atau IGBT, atau transistor bipolar sederhana.
Tabel 3 dan Tabel 4 menunjukkan urutan sakelar daya ini harus diaktifkan berdasarkan input sensor Hall, A, B dan C. Tabel 3 untuk putaran motor searah jarum jam dan Tabel 4 untuk putaran motor berlawanan arah jarum jam. Ini adalah contoh sinyal sensor Hall yang memiliki pergeseran fasa 60 derajat terhadap satu sama lain. Seperti yang telah kita diskusikan sebelumnya di bagian “Sensor Hall”, sensor Hall mungkin berada pada pergeseran fasa 60 ° atau 120 ° satu sama lain. Saat menurunkan pengontrol untuk motor tertentu, urutan yang ditentukan oleh pabrikan motor harus diikuti.
Mengacu pada Gambar 9, jika sinyal yang ditandai dengan PWMx dinyalakan atau dimatikan sesuai dengan urutannya, motor akan berjalan pada kecepatan pengenal. Ini dengan asumsi bahwa tegangan bus DC sama dengan tegangan pengenal motor, ditambah rugi-rugi pada sakelar. Untuk memvariasikan kecepatan, sinyal ini harus berupa Pulse Width Modulated (PWM) pada frekuensi yang jauh lebih tinggi daripada frekuensi motor. Sebagai aturan praktis, frekuensi PWM harus setidaknya 10 kali dari frekuensi maksimum motor. Ketika siklus kerja PWM bervariasi dalam urutan, tegangan rata-rata yang disuplai ke stator berkurang, sehingga mengurangi kecepatan. Keuntungan lain dari memiliki PWM adalah, jika tegangan bus DC jauh lebih tinggi daripada tegangan pengenal motor, motor dapat dikontrol dengan membatasi persentase siklus kerja PWM yang sesuai dengan tegangan pengenal motor. Ini menambah fleksibilitas pengontrol untuk menghubungkan motor dengan tegangan pengenal yang berbeda dan mencocokkan output tegangan rata-rata oleh pengontrol, ke tegangan pengenal motor, dengan mengendalikan siklus kerja PWM.
Ada berbagai pendekatan kontrol. Jika sinyal PWM terbatas di mikrokontroler, sakelar atas dapat dihidupkan sepanjang waktu selama urutan yang sesuai dan sakelar bawah yang sesuai dapat dikendalikan oleh siklus kerja yang diperlukan pada PWM.
Potensiometer, terhubung ke saluran konverter analog-ke-digital pada Gambar 9, adalah untuk mengatur referensi kecepatan. Berdasarkan tegangan input ini, duty cycle PWM harus dihitung.
Kontrol Loop Tertutup
Kecepatan dapat dikontrol dalam loop tertutup dengan mengukur kecepatan aktual motor. Kesalahan dalam kecepatan yang disetel dan kecepatan sebenarnya dihitung. Pengontrol Proporsional plus Integral plus Derivatif (P.I.D.) dapat digunakan untuk memperkuat kesalahan kecepatan dan menyesuaikan siklus tugas PWM secara dinamis.
Untuk persyaratan kecepatan resolusi rendah berbiaya rendah, sinyal Hall dapat digunakan untuk mengukur umpan balik kecepatan. Sebuah timer dari PIC18FXX31 dapat digunakan untuk menghitung antara dua transisi Hall. Dengan hitungan ini, kecepatan aktual motor dapat dihitung.
Untuk pengukuran kecepatan resolusi tinggi, encoder optik dapat dipasang ke motor, yang memberikan dua sinyal dengan perbedaan fase 90 derajat. Dengan menggunakan sinyal-sinyal ini, kecepatan dan arah putaran dapat ditentukan. Juga, sebagian besar encoder memberikan sinyal indeks ketiga, yang merupakan satu pulsa per putaran. Ini dapat digunakan untuk aplikasi penentuan posisi. Encoder optik tersedia dengan pilihan Pulse Per Revolution (PPR) yang berbeda, mulai dari ratusan hingga ribuan.


Sequence # | Hall Sensor Input |
Active PWMs | Phase Current | |||||
A | B | C | A | B | C | |||
1 | 0 | 0 | 1 | PWM1(Q1) | PWM4(Q4) | DC+ | Off | DC- |
2 | 0 | 0 | 0 | PWM1(Q1) | PWM2(Q2) | DC+ | DC- | Off |
3 | 1 | 0 | 0 | PWM5(Q5) | PWM2(Q2) | Off | DC- | DC+ |
4 | 1 | 1 | 0 | PWM5(Q5) | PWM0(Q0) | DC- | Off | DC+ |
5 | 1 | 1 | 1 | PWM3(Q3) | PWM0(Q0) | DC- | DC+ | Off |
6 | 0 | 1 | 1 | PWM3(Q3) | PWM4(Q4) | Off | DC+ | DC- |
Sequence # | Hall Sensor Input |
Active PWMs | Phase Current | |||||
A | B | C | A | B | C | |||
1 | 0 | 1 | 1 | PWM5(Q5) | PWM2(Q2) | Off | DC- | DC+ |
2 | 1 | 1 | 1 | PWM1(Q1) | PWM2(Q2) | DC+ | DC- | Off |
3 | 1 | 1 | 0 | PWM1(Q1) | PWM4(Q4) | DC+ | Off | DC- |
4 | 1 | 0 | 0 | PWM3(Q3) | PWM4(Q4) | Off | DC+ | DC- |
5 | 0 | 0 | 0 | PWM3(Q3) | PWM0(Q0) | DC- | DC+ | Off |
6 | 0 | 0 | 1 | PWM5(Q5) | PWM0(Q0) | DC- | Off | DC+ |
5.6 Aplikasi Motor BLDC
Motor BLDC menemukan aplikasi di setiap segmen pasar. Otomotif, peralatan, kontrol industri, otomatisasi, penerbangan, dan sebagainya, memiliki aplikasi untuk motor BLDC. Dari ini, kita dapat mengkategorikan jenis kontrol motor BLDC menjadi tiga jenis utama:
• Beban konstan
• Beban bervariasi
• Aplikasi pemosisian
Aplikasi Dengan Beban Konstan
Ini adalah jenis aplikasi di mana kecepatan variabel lebih penting daripada menjaga akurasi kecepatan pada kecepatan yang ditentukan. Selain itu, tingkat akselerasi dan deselerasi tidak berubah secara dinamis. Dalam jenis aplikasi ini, beban secara langsung digabungkan ke poros motor. Misalnya, kipas, pompa, dan blower termasuk dalam jenis aplikasi ini. Aplikasi ini menuntut pengontrol berbiaya rendah, sebagian besar beroperasi di loop terbuka.
Aplikasi Dengan Beban yang Bervariasi
Ini adalah jenis aplikasi di mana beban pada motor bervariasi pada rentang kecepatan. Aplikasi ini mungkin menuntut akurasi kontrol kecepatan tinggi dan respons dinamis yang baik. Pada peralatan rumah tangga, mesin cuci, pengering dan kompresor adalah contoh yang baik. Dalam otomotif, kontrol pompa bahan bakar, kontrol kemudi elektronik, kontrol mesin dan kontrol kendaraan listrik adalah contoh yang baik. Di luar angkasa, ada sejumlah aplikasi, seperti sentrifugal, pompa, kontrol lengan robot, kontrol giroskop, dan sebagainya. Aplikasi ini dapat menggunakan perangkat umpan balik kecepatan dan dapat berjalan dalam loop semi-tertutup atau dalam loop tertutup total. Aplikasi ini menggunakan algoritme kontrol tingkat lanjut, sehingga menyulitkan pengontrol. Juga, ini meningkatkan harga sistem yang lengkap.
Aplikasi Pemosisian
Sebagian besar jenis aplikasi industri dan otomasi termasuk dalam kategori ini. Aplikasi dalam kategori ini memiliki beberapa jenis transmisi daya, yang dapat berupa roda gigi mekanis atau sabuk pengatur waktu, atau sistem penggerak sabuk sederhana. Dalam aplikasi ini, respon dinamis dari kecepatan dan torsi adalah penting. Juga, aplikasi ini mungkin memiliki pembalikan arah rotasi yang sering. Siklus tipikal akan memiliki fase percepatan, fase kecepatan konstan dan fase perlambatan dan pemosisian, seperti yang ditunjukkan pada Gambar 11. Beban pada motor dapat bervariasi selama semua fase ini, menyebabkan pengontrol menjadi kompleks. Sistem ini sebagian besar beroperasi dalam loop tertutup. Mungkin ada tiga loop kontrol yang berfungsi secara bersamaan: Loop Kontrol Torsi, Loop Kontrol Kecepatan, dan Loop Kontrol Posisi. Encoder optik atau resolver sinkron digunakan untuk mengukur kecepatan motor yang sebenarnya. Dalam beberapa kasus, sensor yang sama digunakan untuk mendapatkan informasi posisi relatif. Jika tidak, sensor posisi terpisah dapat digunakan untuk mendapatkan posisi absolut. Mesin Computer Numeric Controlled (CNC) adalah contoh yang baik untuk hal ini. Kontrol proses, kontrol mesin, dan kontrol konveyor memiliki banyak aplikasi dalam kategori ini.
5.7 Ringkasan
Kesimpulannya, motor BLDC memiliki keunggulan dibandingkan motor DC brushed dan motor induksi. Mereka memiliki karakteristik kecepatan versus torsi yang lebih baik, respons dinamis tinggi, efisiensi tinggi, masa pakai operasi yang lama, operasi tanpa suara, rentang kecepatan yang lebih tinggi, konstruksi yang kokoh, dan sebagainya. Selain itu, torsi yang dikirimkan ke ukuran motor lebih tinggi, sehingga berguna dalam aplikasi di mana ruang dan berat merupakan faktor penting. Dengan keunggulan ini, motor BLDC menemukan aplikasi yang tersebar luas di industri otomotif, peralatan, kedirgantaraan, konsumen, medis, instrumentasi, dan otomasi.
Last modified: Monday, 13 March 2023, 12:07 AM
