 STECHOQ TRAINING CENTER
STECHOQ TRAINING CENTER
Day 4 - Dasar Motor Sizing
Dasar Motor Sizing
Ketika merancang suatu sistem mekanik tentu membutuhkan penggerak berupa motor. Dari sekian banyak jenis motor dan berbagai ukuran (torsi, kecepatan, daya, dsb.) bagaimana cara memilih jenis dan ukuran motor yang tepat untuk suatu sistem mekanik yang akan dibuat? Dalam modul ini akan dijelaskan mengenai motor sizing, sebuah prosedur yang digunakan oleh para insinyur perancangan dalam memilih motor untuk suatu sistem mekanik yang dirancang.
2.1.1 Mengapa perlu motor sizing?
Pentingnya motor sizing tidak boleh diremehkan. Motor sizing yang tepat tidak hanya akan menghasilkan penghematan biaya yang signifikan dengan menghemat energi, mengurangi biaya pembelian dan pengoperasian, serta mengurangi downtime. Hal ini juga membantu insinyur untuk merancang sistem kontrol gerak yang lebih baik.
Aspek Umum
Motor servo merupakan faktor biaya yang paling berpengaruh dalam desain sistem kontrol gerak, tidak hanya selama proses pembelian, tetapi terutama selama operasi. Motor dengan torsi tinggi akan membutuhkan penguat yang lebih kuat dan karenanya lebih mahal daripada motor yang lebih kecil. Kombinasi dari motor torsi yang lebih tinggi ditambah amplifier tidak hanya menghasilkan biaya awal yang lebih tinggi, tetapi juga akan menyebabkan biaya operasional yang lebih tinggi, khususnya peningkatan konsumsi energi. Diperkirakan, bahwa harga pembelian hanya mewakili sekitar 2% dari total biaya siklus hidup; sekitar 96% adalah listrik.

Motor sizing servo yang tepat tidak hanya akan menjamin kinerja sistem terbaik; itu juga memberikan penghematan biaya yang cukup besar. Metode motor sizing pada motor servo didasarkan pada perhitungan beban sistem, yang menentukan ukuran motor yang diperlukan. Standar secara praktis menuntut untuk menambahkan faktor keamanan pada persyaratan torsi untuk menutupi gaya gesekan tambahan yang mungkin terjadi karena penuaan komponen mekanis. Namun, penentuan beban sistem dan pemilihan motor servo yang tepat bisa sangat memakan waktu. Setiap motor memiliki inersia rotor masing-masing, yang berkontribusi pada torsi beban sistem, karena Torsi sama dengan Inersia kali Percepatan.
Aspek Teknikal
Oversizing motor lebih umum daripada undersizing. Motor yang terlalu kecil akibatnya tidak dapat memindahkan beban secara memadai (atau tidak sama sekali) dan, dalam kasus yang ekstrim, dapat menjadi terlalu panas dan terbakar, terutama bila tidak dapat membuang limbah panas dengan cukup cepat. Motor yang lebih besar akan tetap dingin, tetapi jika terlalu besar akan membuang energi selama pengoperasian yang tidak efisien. Bagaimanapun, proses sizing motor juga dapat dilihat sebagai tindakan penyeimbangan energi.
Motor AC cenderung menjadi panas ketika diberi beban terlalu berat atau terlalu ringan. Motor servo, baik berukuran terlalu kecil atau terlalu besar, pasti akan mulai bergetar atau mengalami masalah macet.
Salah satu kesalahpahaman utama selama proses desain gerak adalah bahwa memilih motor yang lebih besar dari yang dibutuhkan hanyalah harga kecil yang harus dibayar untuk kemampuan menangani beban yang diperlukan, terutama karena beban dapat meningkat selama masa pakai aplikasi karena peningkatan mekanis. memakai. Namun, seperti yang ditunjukkan pada gambar di bawah, efisiensi motor menurun dengan cepat ketika motor beroperasi di bawah beban yang dirancang.

Gambar di atas menunjukkan contoh dua motor, 10 HP dan 100 HP. Dalam kedua kasus ada penurunan tajam dari efisiensi motor terjadi saat beban (load) yang diberikan sekitar 30% dari rated load. Namun, kurva seperti yang ditunjukkan pada gambar, akan bervariasi secara substansial dari motor ke motor dan sulit untuk mengatakan kapan tepatnya motor oversize. Sebagai aturan umum, ketika motor beroperasi pada 40% atau kurang dari beban ratednya, sebaiknya motor diganti dengan ukuran yang lebih kecil, terutama dalam kasus di mana beban tidak terlalu bervariasi. Aplikasi motor servo biasanya memerlukan operasi jangka pendek pada beban yang lebih tinggi, terutama selama akselerasi dan deselerasi, yang membuatnya perlu untuk melihat torsi rata-rata (RMS) dan torsi puncak aplikasi.
Namun, ada keuntungan dari oversize motor:
Komponen mekanis (misalnya kopling, ball bearing, dll.) dapat tergantung pada lingkungan dan kondisi operasi, mengalami keausan dan sebagai hasilnya dapat menghasilkan gaya gesekan yang lebih tinggi. Gaya gesekan berkontribusi pada torsi konstan dari pengaturan mekanis.
Oversizing dapat memberikan kapasitas tambahan untuk ekspansi di masa depan dan dapat menghilangkan kebutuhan untuk mengganti motor.
Motor berukuran besar dapat menampung beban tinggi yang tidak terduga.
Motor berukuran besar lebih mungkin untuk memulai dan beroperasi dalam kondisi tegangan rendah.
Secara umum, oversizing yang tidak terlalu besar/berlebih sekitar 20% masih dapat diterima
2.1.2 Tujuan Motor Sizing
Tujuan utama dari Motor Sizing didasarkan pada logika bisnis: Dapatkan kinerja terbaik dengan harga terendah. Seperti yang telah kita pelajari dari bab sebelumnya, biaya siklus hidup motor listrik adalah:
Biaya Pembelian – 2%
Perbaikan, Servis, Pemeliharaan, dll. – 2%
Biaya Operasional (Listrik) – 96%
Untuk mendapatkan performa terbaik dengan harga terbaik, wajib untuk menemukan motor terkecil yang memenuhi persyaratan, yaitu motor yang sedekat mungkin dengan torsi yang dibutuhkan. Asumsi dasar (yang berlaku untuk sebagian besar kasus) adalah bahwa torsi kecil berbanding lurus dengan ukuran yang lebih kecil, biaya yang lebih rendah, dan konsumsi daya yang lebih rendah. Konsumsi daya yang lebih kecil juga menghasilkan ukuran dan harga drive/amplifier yang lebih kecil.
Dari sudut pandang teknis, juga diinginkan untuk menemukan motor yang inersia rotornya sesuai dengan inersia pengaturan mekanis sedekat mungkin, yaitu rasio optimal antara beban dengan inersia rotor 1 : 1. Kecocokan inersia akan memberikan kinerja terbaik. Namun, untuk motor servo rasio hingga 6 : 1 masih memberikan performa yang wajar. Setiap rasio yang lebih tinggi akan mengakibatkan ketidakstabilan sistem dan pada akhirnya akan menyebabkan kerusakan total. Penjelasan lebih detil mengenai pengaruh inersia motor dan beban terhadap pemilihan motor akan dijelaskan pada modul yang akan datang.
Dalam banyak kasus, masuk akal untuk menambahkan roda gigi antara motor dan beban aktual. Sebuah gigi menurunkan inersia yang dipantulkan ke motor dalam proporsi langsung dari rasio transmisi. Skenario ini memungkinkan untuk menjalankan motor yang lebih kecil, dengan penambahan biaya dari roda gigi ke sistem. Di sisi lain, pengurangan harga dengan menggunakan kombinasi motor/penggerak yang lebih kecil mungkin dapat menghasilkan penghematan lebih besar walaupun dengan biaya tambahan gear.
Dalam meninjau tujuan Motor Sizing adalah untuk:
Dapatkan performa terbaik dengan harga terbaik
Cocokkan torsi motor dengan torsi beban sedekat mungkin
Cocokkan inersia motor dengan inersia beban sedekat mungkin
Temukan motor yang cocok atau melebihi kecepatan yang dibutuhkan
2.1.3 Proses Motor Sizing dan Pemilihan Motor
Proses penentuan ukuran dan pemilihan motor didasarkan pada perhitungan torsi dan inersia yang ditentukan oleh pengaturan mekanis ditambah kecepatan dan akselerasi yang dibutuhkan oleh aplikasi. Motor yang dipilih harus dapat dengan aman menggerakkan pengaturan mekanis dengan memberikan torsi dan kecepatan yang cukup.
Setelah persyaratan ditetapkan, mudah untuk melihat kurva torsi vs. kecepatan atau spesifikasi motor dan memilih motor yang tepat.
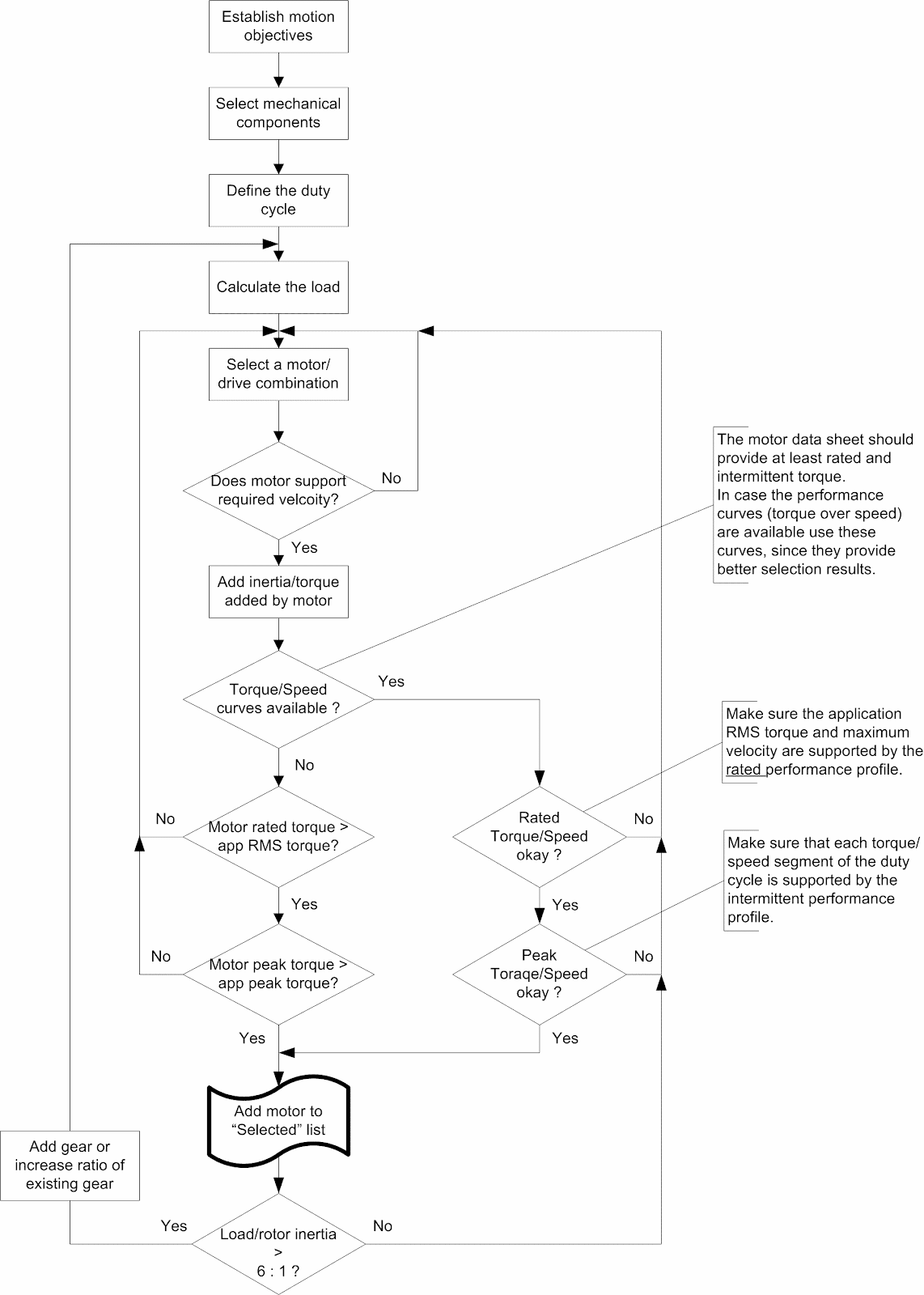
Proses sizing melibatkan langkah-langkah berikut:
1. Penetapan tujuan gerak
2. Pemilihan komponen mekanis
3. Penentuan siklus beban (duty cycle)
4. Perhitungan beban
5. Pemilihan motor
1) Penetapan tujuan gerak
Menuliskan garis besar kontrol gerakan akan membantu untuk menetapkan parameter yang diperlukan yang diperlukan untuk langkah selanjutnya.
Akurasi posisi yang dibutuhkan?
Repeatability posisi yang dibutuhkan?
Akurasi kecepatan yang dibutuhkan?
Aplikasi linier atau putar?
Jika aplikasi linier: Aplikasi horizontal atau vertikal?
Pertimbangan termal – Suhu sekitar (ambient)?
Teknologi motor apa yang paling cocok untuk aplikasi?
2) Pemilihan komponen mekanis
Insinyur harus memutuskan komponen mekanis mana yang diperlukan untuk aplikasi. Misalnya, aplikasi linier mungkin memerlukan leadcrew atau konveyor. Untuk transmisi kecepatan, roda gigi atau penggerak sabuk dapat digunakan.
Drive langsung?
Aplikasi khusus atau perangkat mekanis standar?
Jika aplikasi linier: Penggunaan motor linier atau leadcrew, konveyor, dll. ?
Diperlukan peredam – Gearbox, belt drive, dll. ?
Periksa dimensi poros – pilih kopling
Periksa komponen mekanis untuk batasan kecepatan dan akselerasi
3) Penentuan siklus beban (duty cycle)
Insinyur harus menentukan kecepatan maksimum, akselerasi maksimum, waktu siklus kerja, ramp akselerasi dan deselerasi, waktu diam, dll., khusus untuk aplikasi.
Tentukan parameter gerakan kritis seperti kecepatan, laju akselerasi
Profil gerak (motion profile) segitiga, trapesium, atau lainnya?
Jika aplikasi linier: Pastikan siklus kerja tidak melebihi rentang perjalanan perangkat gerak linier.
Batasan brengsek diperlukan?
Pertimbangan beban dorong ?
Apakah beban berubah selama siklus kerja?
Memegang rem diterapkan selama kecepatan nol?
4) Perhitungan beban
Beban ditentukan oleh torsi yang diperlukan untuk menggerakkan pengaturan mekanis. Besarnya torsi ditentukan oleh inersia yang “dipantulkan” dari pengaturan mekanis ke motor dan percepatan pada poros motor.
Hitung inersia semua komponen yang bergerak
Tentukan inersia yang dipantulkan ke motor
Tentukan kecepatan, percepatan pada poros motor
Hitung torsi percepatan pada poros motor
Tentukan gaya non-inersia seperti gravitasi, gesekan, gaya pra-beban, dll.
Hitung torsi konstan pada poros motor
Hitung akselerasi total dan torsi RMS (continuous over duty cycle) pada poros motor
5) Pemilihan Motor
Motor harus mampu menyediakan torsi yang dibutuhkan oleh pengaturan mekanis ditambah torsi yang ditimbulkan oleh rotornya sendiri. Setiap motor memiliki inersia rotor yang spesifik, yang berkontribusi pada torsi seluruh sistem gerak. Saat memilih motor, insinyur perlu menghitung ulang torsi beban untuk masing-masing motor.
Tentukan teknologi motor yang akan digunakan (DC brush, DC brushless, stepper, dll.
Pilih kombinasi motor/penggerak
Apakah motor mendukung kecepatan maksimum yang diperlukan? Jika tidak, pilih motor/drive berikutnya.
Gunakan inersia rotor untuk menghitung sistem (motor plus komponen mekanis) akselerasi (puncak) dan torsi RMS
Apakah torsi pengenal motor mendukung torsi RMS sistem? Jika tidak, pilih motor/drive berikutnya.
Apakah torsi intermiten motor mendukung torsi puncak sistem? Jika tidak, pilih motor/drive berikutnya.
Apakah kurva performa motor (torque over speed) mendukung persyaratan torsi dan kecepatan? Jika tidak, pilih motor/drive berikutnya.
Jika rasio beban di atas inersia rotor melebihi kisaran tertentu (untuk motor servo 6:1) pertimbangkan penggunaan gearbox atau tingkatkan rasio transmisi gearbox yang ada. Motor servo tidak boleh dioperasikan dengan rasio 10:1.
Diagram alir motor sizing dapat dilihat pada gambar berikut :
Proses Motor Sizing : Profil Gerakan
Sebuah siklus beban, yaitu cara gerakan yang sebenarnya diterapkan, dapat memiliki banyak bentuk. Ada, misalnya, aplikasi sederhana seperti blower, penggerak konveyor, pompa, dll. yang hanya menghasilkan torsi yang konstan atau berubah secara bertahap dalam waktu yang sangat lama. Motor Sizing untuk aplikasi ini cukup sederhana dan tidak memerlukan pemrosesan siklus gerak lebih lanjut. Buku ini terutama membahas aplikasi servo, yang memerlukan perubahan torsi yang tiba-tiba dan sering selama siklus beban.
Bentuk paling sederhana dari siklus beban servo adalah profil gerak segitiga dan trapesium (seperti yang dijelaskan secara rinci dalam bab-bab berikut). Mereka mendefinisikan data yang paling penting seperti kecepatan maksimum dan akselerasi maksimum dan mereka cukup memadai untuk mencakup sebagian besar aplikasi gerak dan penentuan persyaratan torsi selanjutnya. Tentu saja ada juga profil gerak yang sangat kompleks dan pemrosesan detailnya akan menghasilkan penentuan kebutuhan torsi RMS yang lebih tepat, sedangkan persyaratan torsi puncak (berselang) terutama bergantung pada akselerasi maksimum di dalam siklus gerak.
Untuk memproses siklus beban, insinyur harus menentukan kecepatan maksimum, akselerasi maksimum, waktu siklus kerja, ramp akselerasi dan deselerasi, waktu diam, dll., khusus untuk aplikasi.
Tentukan parameter gerakan kritis seperti kecepatan, laju akselerasi
Profil gerak segitiga, trapesium, atau lainnya?
Jika aplikasi linier: Pastikan siklus kerja tidak melebihi rentang perjalanan perangkat gerak linier.
Batasan brengsek diperlukan?
Pertimbangan beban dorong ?
Apakah beban berubah selama siklus kerja?
Memegang rem diterapkan selama kecepatan nol?
Ada dua tipe dasar (dan sangat mirip) dari profil gerak (siklus tugas/beban):
Gerak Segitiga
Gerak Trapesium
2.2.1 Profil Segitiga

Simbol | Keterangan |
V | Kecepatan |
Vmax | Kecepatan Maksimum |
t | Waktu |
ta | Waktu Percepatan |
td | Waktu Perlambatan |
t0 | Waktu Tinggal (Waktu dengan kecepatan nol) |
Motor berakselerasi ke kecepatan maksimum dan kemudian segera setelah mencapai kecepatan maksimum melambat menuju nol. Tergantung pada aplikasinya, motor mungkin tidak bergerak selama beberapa waktu.
Untuk aplikasi linier non-horizontal, yaitu beban dipindahkan dengan sudut naik atau turun, penting untuk mempertimbangkan penggunaan rem penahan. Motor perlu mengimbangi tarikan gravitasi pada beban selama siklus kecepatan nol, yang, tanpa menggunakan rem penahan, akan menghasilkan persyaratan torsi yang lebih tinggi.
2.2.2 Profil Trapesium

Simbol | Keterangan |
V | Kecepatan |
Vmax | Kecepatan Maksimum |
t | Waktu |
ta | Waktu Percepatan |
td | Waktu Perlambatan |
t0 | Waktu Tinggal (Waktu dengan kecepatan nol) |
Motor berakselerasi ke kecepatan maksimum, menahan kecepatan itu untuk beberapa waktu dan kemudian melambat menuju nol. Tergantung pada aplikasinya, motor mungkin tidak bergerak selama beberapa waktu.
2.2.3 Pemrosesan profil gerak
Untuk menghitung kebutuhan torsi, kita memerlukan data berikut dari profil gerak:
Torsi RMS
Total waktu siklus
Waktu akselerasi/Deselerasi
Waktu konstan (waktu dengan kecepatan konstan; akan menjadi nol untuk profil segitiga)
Waktu tinggal (waktu dengan kecepatan nol)
Torsi Puncak (Intermiten)
Percepatan/Perlambatan Maksimum (Torsi = Inersia kali Percepatan)
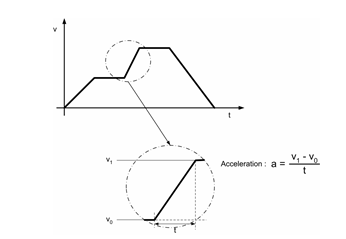
Parameter siklus kerja untuk penentuan torsi RMS secara alami dapat diturunkan langsung dari profil gerak. Percepatan maksimum dihitung seperti yang ditunjukkan di bawah ini:

Jika profil gerak yang lebih kompleks diperlukan, insinyur perlu memproses semua segmen waktu untuk menghitung torsi RMS. Untuk menghitung torsi puncak (intermiten) insinyur perlu mencatat percepatan/perlambatan setiap segmen waktu dan menentukan percepatan maksimum dari nilai-nilai ini seperti yang ditunjukkan pada contoh berikutnya.
Gambar berikut menunjukkan perbedaan antara profil gerak segitiga dan trapesium dalam hal persyaratan torsi. Kecepatan dalam rpm, torsi dalam inch.lb, waktu dalam detik (s), tetapi berlaku juga untuk sistem satuan yang lain.

Kedua profil gerakan menggunakan total waktu siklus yang sama. Profil trapesium, bagaimanapun, membutuhkan tingkat percepatan/perlambatan yang lebih tinggi, yang pada gilirannya menghasilkan persyaratan torsi yang lebih tinggi. Keadaan ini dapat menjadi penting untuk beberapa aplikasi kontrol gerak.
Contoh Aplikasi :
Contoh Aplikasi: | Perhitungan Percepatan Beban Maksimum |
| Profil gerak harus berbentuk trapesium dengan menggunakan parameter berikut: ta = td = 1 detik tc = 2 detik, t0 = 1 detik Vmax = 1000 rpm = 16,67 putaran/detik Parameter turunannya adalah: ttotal = 4 detik amax = Vmax / ta = 16,67 / 1 = 16,67 putaran/detik2 |

2.2.4 Perhitungan profil gerak
Bagian ini memberikan lebih banyak wawasan tentang perhitungan profil gerak dalam pengertian yang lebih umum. Persamaan seperti yang ditunjukkan di sini didasarkan pada penggunaan radian untuk jarak tempuh, rad/s untuk kecepatan dan rad/s2 untuk percepatan dan perlambatan.

Simbol | Keterangan | Satuan sudut | Satuan rotasi |
ω | Kecepatan | rad/dtk | rps atau rpm |
ωmax | Kecepatan Maksimum | “ | “ |
α | Percepatan | rad/dtk2 | putaran/ detik2 |
Θ | Jarak (rotasi) | rad | putaran |
a | Jarak (rotasi) selama percepatan | “ | “ |
c | Jarak (rotasi) selama kecepatan konstan | “ | “ |
d | Jarak (rotasi) selama deselerasi | “ | “ |
t | Waktu | detik | detik |
tc | Waktu Konstan | “ | “ |
ta | Waktu Percepatan | “ | “ |
td | Waktu Perlambatan | “ | “ |
Persamaan gerak trapesium adalah:

Persamaan untuk gerak segitiga (dengan tc = 0) adalah:

Persamaan ini dapat dengan mudah diingat dengan mengetahui bahwa area di bawah segmen kecepatan vs. waktu mewakili jarak yang ditempuh dan kemiringannya adalah percepatan. Persamaan demikian didasarkan pada perhitungan luas persegi panjang dan segitiga dan sudutnya, masing-masing.
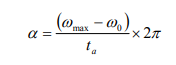
ω0 mewakili kecepatan sudut atau rotasi awal. Dengan ω0 = 0 persamaan berubah menjadi:

Umumnya, ada aplikasi gerak yang memerlukan siklus beban yang lebih kompleks dan pemrosesan profil gerak selanjutnya, yang pada gilirannya memiliki implikasi besar pada torsi beban. Aplikasi-aplikasi tersebut misalnya, gerakan vertikal, pembatasan sentakan (S-Curve), dll. yang akan dijelaskan lebih rinci nanti. Untuk tujuan pendidikan tampaknya perlu untuk menutupi dasar-dasar sebelum terlibat dalam model matematika yang lebih canggih.
2.2.5 Persamaan profil gerak
Parameter | Keterangan | Teknik Bahasa Inggris | Metrik |
Θ | Rotasi | putaran | rad |
ω | Kecepatan | putaran/detik, rpm | rad/dtk |
t | Waktu | detik | detik |
α | Percepatan | putaran/detik2 | rad/dtk2 |


Last modified: Monday, 13 March 2023, 12:11 AM
