 STECHOQ TRAINING CENTER
STECHOQ TRAINING CENTER
Respon Sistem Orde
Respon Sistem Orde
Sistem Orde Satu
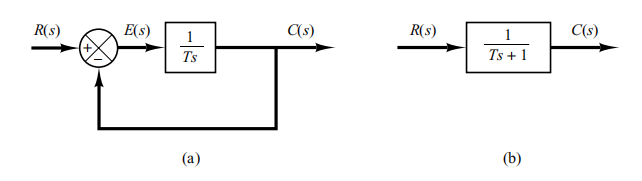
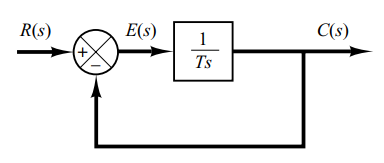
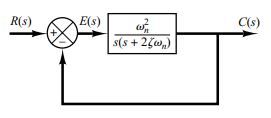
Perhatikan sistem orde pertama yang ditunjukkan pada Gambar di bawah ini:
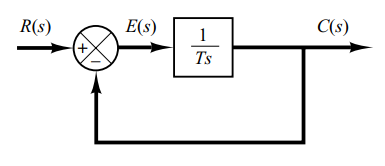
Secara fisik, sistem ini dapat mewakili Rangkaian RC, sistem termal, atau sejenisnya. Diagram blok yang disederhanakan ditunjukkan pada Gambar di bawah ini:
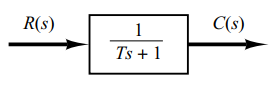
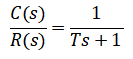
Hubungan input-output didapatkan sebagai
Berikut ini, kita akan menganalisis respons sistem terhadap input seperti fungsi step-unit, ramp-unit, dan impuls-unit. Kondisi awal diasumsikan nol.
Perhatikan bahwa semua sistem yang memiliki fungsi alih yang sama akan menunjukkan keluaran yang sama sebagai respons terhadap masukan yang sama. Untuk sistem fisik apa pun, respons matematis dapat diberikan interpretasi fisik.
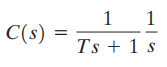
Unit-Step Response dari sistem orde satu
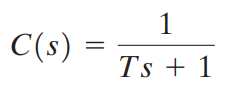
Karena transformasi Laplace dari fungsi step-unit adalah 1/s, dengan mensubstitusikan R(s)=1/s ke dalam Persamaan di atas, maka kita memperoleh
Memperluas C(s) menjadi pecahan parsial menghasilkan

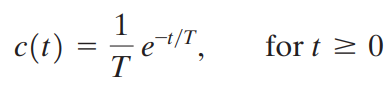
Mengambil transformasi Laplace terbalik dari Persamaan di atas, maka kita dapatkan

Persamaan di atas menyatakan bahwa keluaran awalnya c(t) adalah nol dan akhirnya menjadi satu. Salah satu karakteristik penting dari kurva respons eksponensial c(t) adalah bahwa pada t=T nilai c(t) adalah 0,632, atau respons c(t) telah mencapai 63,2% dari total perubahannya. Hal ini dapat dengan mudah dilihat dengan mengganti t=T dalam c(t). Itu adalah,

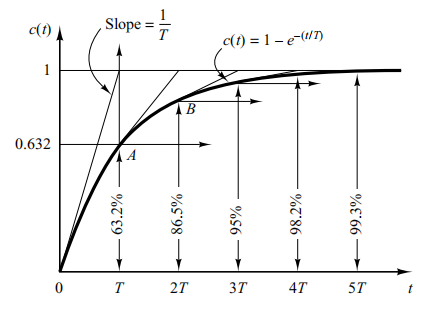
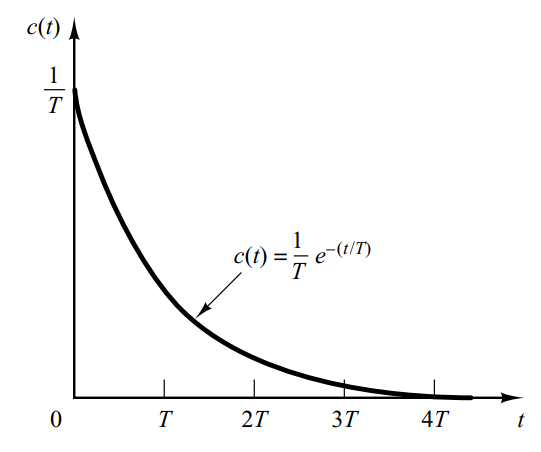
Perhatikan bahwa semakin kecil konstanta waktu T, semakin cepat respons sistem. Karakteristik penting lainnya dari kurva respons eksponensial adalah kemiringan garis singgung pada t=0 adalah 1/T, karena
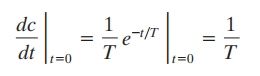
Output akan mencapai nilai akhir pada t=T jika mempertahankan kecepatan respon awal. Dari Persamaan di atas kita melihat bahwa kemiringan kurva respons c(t) menurun secara monoton dari 1/T pada t=0 menjadi nol pada t=∞
Kurva respons eksponensial c(t) yang diberikan oleh Persamaan
ditunjukkan pada Gambar grafik di atas. Dalam konstanta satu waktu, kurva respons eksponensial telah berubah dari 0 menjadi 63,2% dari nilai akhir. Dalam dua konstanta waktu, respons mencapai 86,5% dari nilai akhir. Pada t=3T, 4T, dan 5T, respons masing-masing mencapai 95%, 98,2%, dan 99,3%, dari nilai akhir. Jadi, untuk t> = 4T, respons tetap berada dalam 2% dari nilai akhir. Kondisi steady dicapai secara matematis hanya setelah waktu yang tak terhingga. Namun, dalam praktiknya, perkiraan waktu respons yang masuk akal adalah lamanya waktu yang dibutuhkan kurva respons untuk mencapai dan bertahan dalam garis 2% dari nilai akhir, atau empat konstanta waktu.
Unit-Ramp Response dari Sistem Order Satu
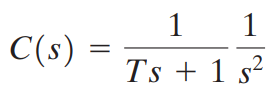
Karena transformasi Laplace dari fungsi unit-ramp adalah 1/s2, maka berdasarkan blok diagram berikut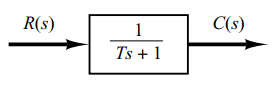
kita memperoleh output
Memperluas C(s) menjadi pecahan parsial menghasilkan
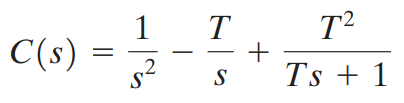
Mengambil transformasi Laplace terbalik dari Persamaan di atas, kita memperoleh
Sinyal error e(t) kemudian
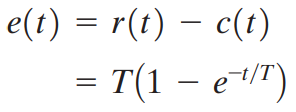
Saat t mendekati tak terhingga, e^–t/T mendekati nol, dan dengan demikian sinyal kesalahan e(t) mendekati T atau
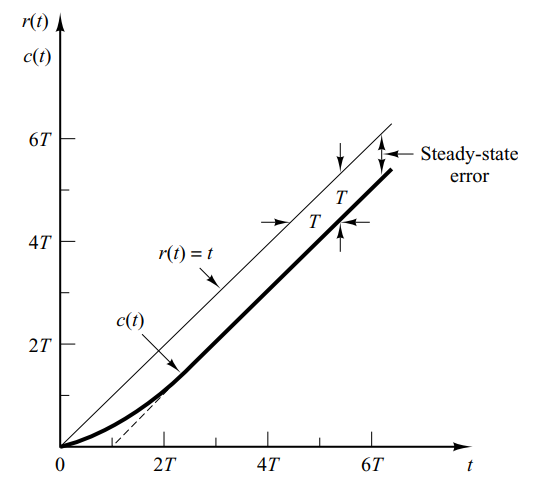
Input unit-ramp dan output sistem ditunjukkan pada Gambar grafik di atas. Kesalahan dalam mengikuti input unit-ramp sama dengan T untuk t yang cukup besar. Semakin kecil konstanta waktu T, semakin kecil kesalahan steady-state dalam mengikuti input ramp
Unit-Impulse Response dari Sistem Orde Satu
Untuk input unit-impuls,
R(s)=1 dan output dari sistem Gambar di bawah ini
dapat diperoleh sebagai
Transformasi Laplace terbalik dari Persamaan di atas memberikan
Kurva respons yang diberikan oleh Persamaan di atas ditunjukkan pada Gambar di bawah ini.
Sistem Orde Dua
Pada bagian ini, kita akan mendapatkan respons dari sistem kendali orde kedua yang khas terhadap input step, input ramp, dan input impuls. Di sini kami memberikan sistem servo sebagai contoh sistem orde kedua
Sistem Servo
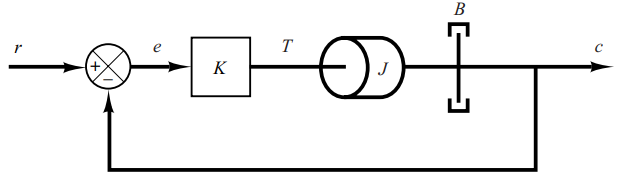
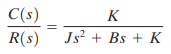
Sistem servo yang ditunjukkan pada Gambar di atas terdiri dari pengontrol proporsional dan elemen beban (elemen inersia dan gesekan viskos). Misalkan kita ingin mengontrol posisi output c sesuai dengan posisi input r. Persamaan untuk elemen beban adalah
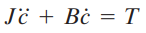
di mana T adalah torsi yang dihasilkan oleh pengontrol proporsional yang penguatannya adalah K. Dengan mengambil transformasi Laplace dari kedua sisi persamaan terakhir ini, dengan asumsi kondisi awal nol, kita memperoleh

Jadi fungsi transfer antara C (s) dan T (s) adalah
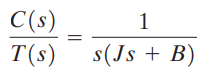
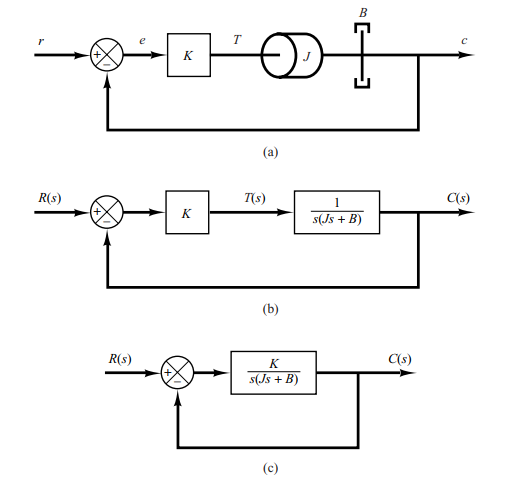
Dengan menggunakan fungsi transfer ini, Gambar (a) dapat digambar ulang seperti pada Gambar (b), yang dapat dimodifikasi seperti yang ditunjukkan pada Gambar (c). Fungsi transfer loop tertutup kemudian diperoleh sebagai

Sistem seperti itu di mana fungsi transfer loop tertutup memiliki dua kutub disebut sistem orde kedua. (Beberapa sistem orde kedua mungkin melibatkan satu atau dua nol.)
Step Response of Sistem Orde Dua
Fungsi transfer loop tertutup dari sistem yang ditunjukkan pada Gambar (c) adalah
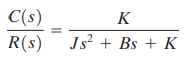
yang dapat ditulis ulang sebagai
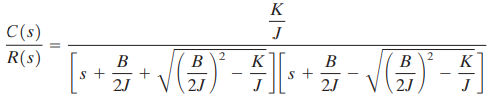
Kutub loop tertutup adalah konjugat kompleks jika  dan mereka nyata jika
dan mereka nyata jika  . Dalam analisis respons sementara, akan lebih mudah untuk menulis
. Dalam analisis respons sementara, akan lebih mudah untuk menulis
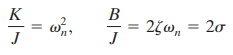
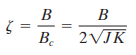
di mana σ disebut atenuasi; ωn frekuensi alami yang tidak teredam; dan ζ rasio redaman sistem. Rasio redaman ζ adalah rasio redaman B aktual terhadap redaman kritis  atau
atau
Pada ζ dan ωn, sistem yang ditunjukkan pada Gambar (c) dapat dimodifikasi hingga yang ditunjukkan pada Gambar di bawah ini.
dan fungsi transfer loop tertutup C(s)/R(s)
dapat ditulis ulang menjadi
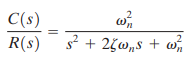
Perilaku dinamis dari sistem orde kedua kemudian dapat dijelaskan dalam dua parameter: ζ dan ωn. Jika 0<ζ<1, kutub loop tertutup adalah konjugat kompleks dan terletak di bidang s setengah kiri. Sistem ini kemudian disebut underdamped, dan respons transien berosilasi. Jika ζ = 0, respons transien tidak mati. Jika ζ = 1, sistem ini disebut critically damped. Sistem overdamped sesuai dengan ζ>1.
sehinggi dapat disimpulkan bahwa terdapat tiga kondisi respon sistem orde 2 yaitu
- Underdamped (0<ζ<1)
- Critically damped (ζ=1)
- Overdamped (ζ>1)
Last modified: Tuesday, 23 May 2023, 8:57 AM
